

Automatic lane changing control method and device and vehicle
A control method and vehicle technology, which are applied to control devices, vehicle components, transportation and packaging, etc., can solve the problems that vehicles cannot effectively change target lanes and have potential safety hazards, and achieve the effect of meeting the needs of automatic driving.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
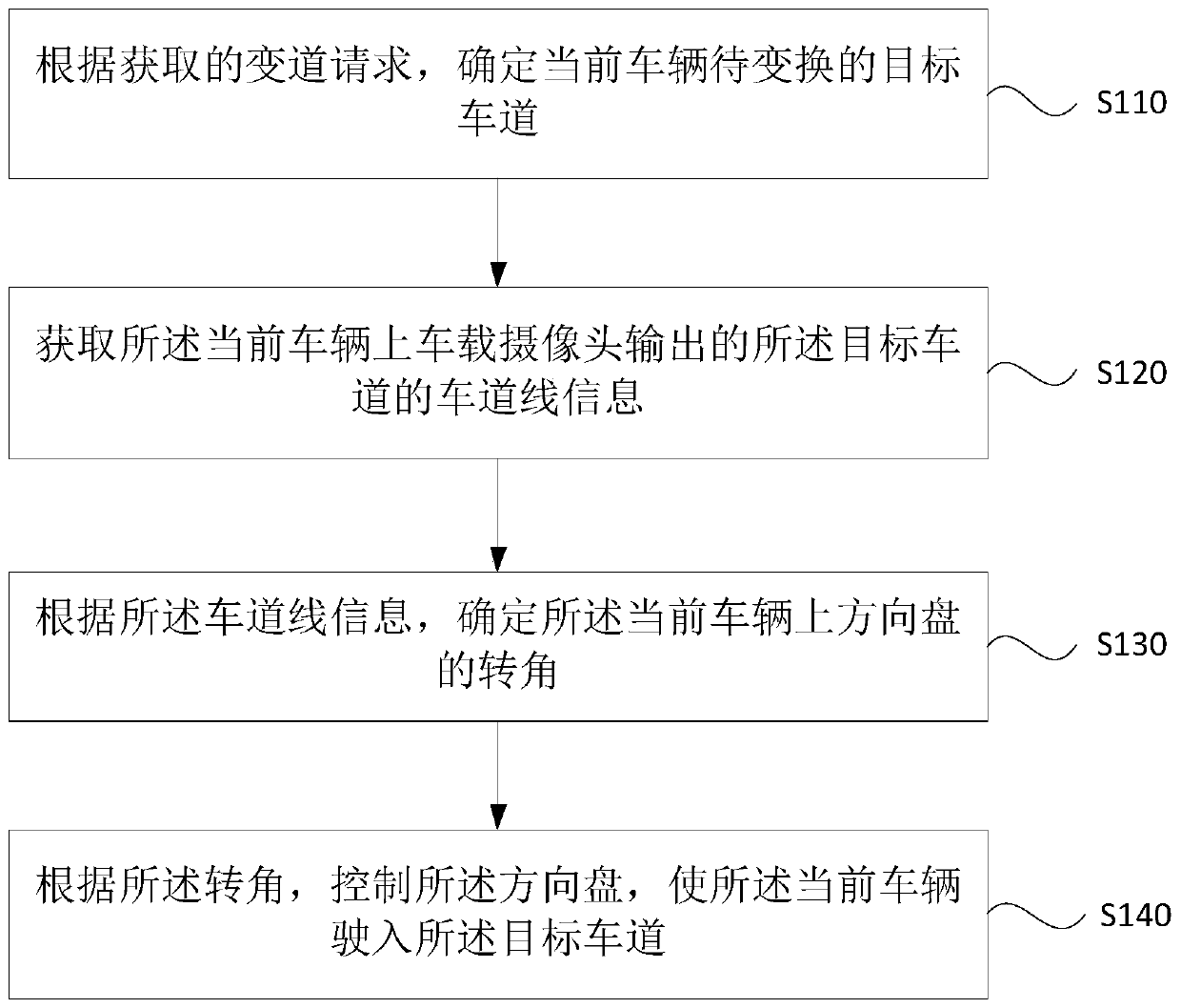
[0035] figure 1 It is a flow chart of an automatic lane change control method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation where an automatic driving vehicle can automatically change lanes when it needs to change lanes. The control device can be implemented by means of software and / or hardware, and can be integrated in the vehicle. Specifically, the method includes the following steps:
[0036] S110. Determine the target lane to be changed by the current vehicle according to the obtained lane change request.
[0037] A lane change request is a request to make the current vehicle change lanes to the left or right. It can be determined whether there is a lane change request based on the state of the turn signal. For example, when the turn signal is on, it means that there is a lane change request, that is, there is a lane change request If the left turn signal is on, it means that you need to change lanes to the left; if the...
Embodiment 2
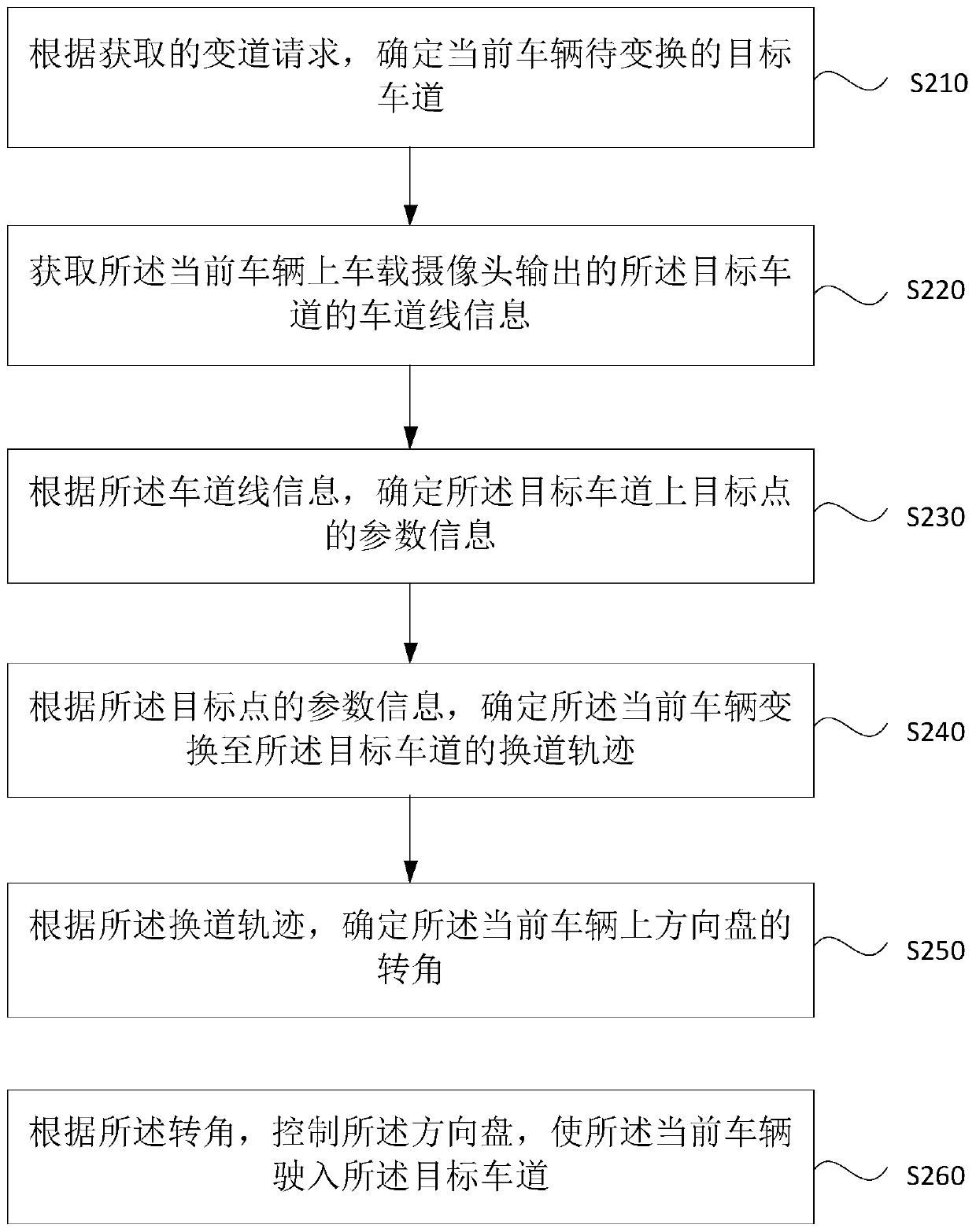
[0049] image 3 It is a flow chart of an automatic lane change control method provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above embodiments. Specifically, the method includes the following steps:
[0050] S210. Determine the target lane to be changed by the current vehicle according to the obtained lane change request.
[0051] S220. Acquire lane line information of the target lane output by the vehicle-mounted camera on the current vehicle.
[0052] S230. Determine parameter information of a target point on the target lane according to the lane line information.
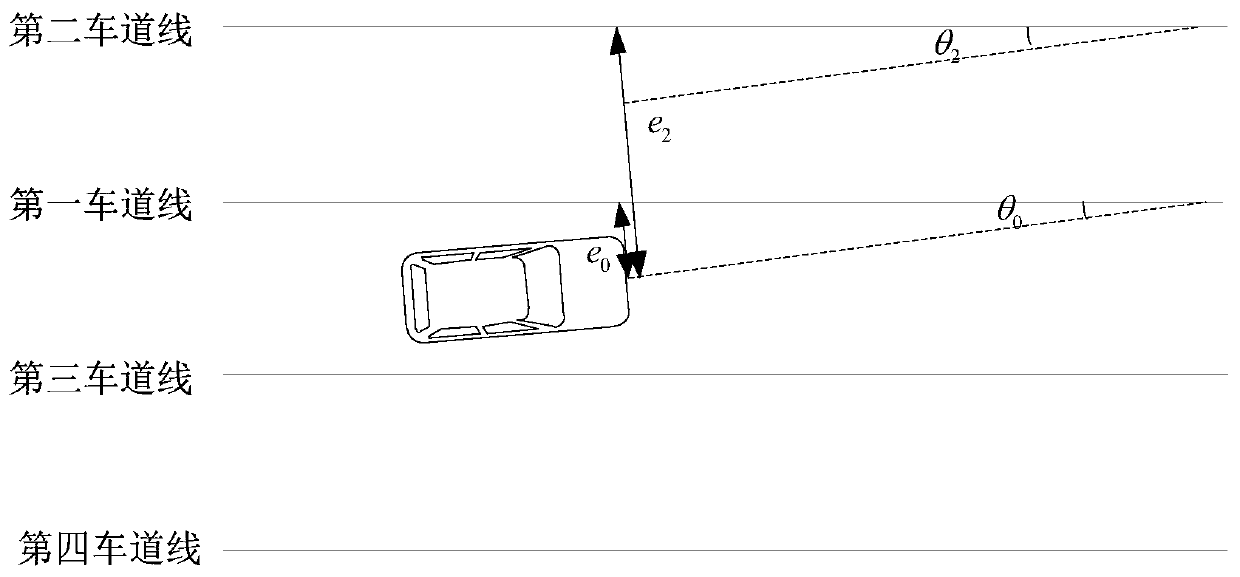
[0053] Optionally, the lane line information includes: the first lateral deviation and the first heading angle between the current vehicle and the first lane line corresponding to the target lane in the vehicle coordinate system, and the second lane line corresponding to the target lane The second lateral deviation and the second heading angle of . The vehicl...
Embodiment 3
[0100] Figure 8 It is a structural diagram of a control device for automatic lane change provided by Embodiment 3 of the present invention. The device can execute the control method for automatic lane change described in the above embodiment. Specifically, the device includes:
[0101] The target lane determination module 310 is configured to determine the target lane to be changed by the current vehicle according to the obtained lane change request;
[0102] An information acquisition module 320, configured to acquire the lane line information of the target lane output by the vehicle-mounted camera on the current vehicle;
[0103] A rotation angle determination module 330, configured to determine the rotation angle of the steering wheel on the current vehicle according to the lane line information;
[0104] The control module 340 is configured to control the steering wheel according to the turning angle so that the current vehicle drives into the target lane.
[0105] Embo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More