

Indoor firefighter positioning method based on single reference node/inertia combination
A technology of reference node and inertia combination, applied in the direction of navigation, measurement devices, instruments, etc. through velocity/acceleration measurement, to improve the problem of excessive sensitivity to abnormal noise, reduce hardware complexity and installation complexity, and reduce approximation errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
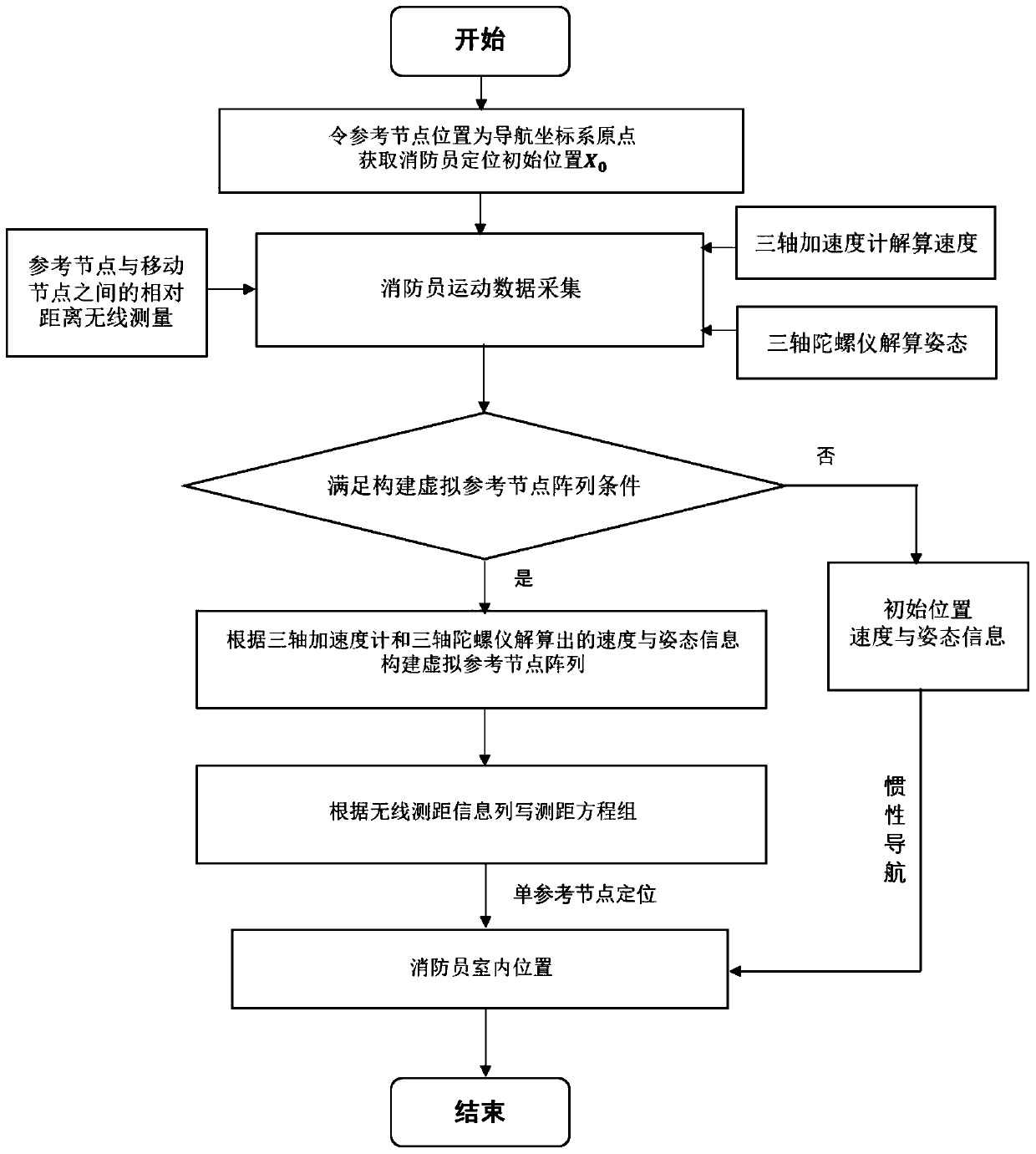
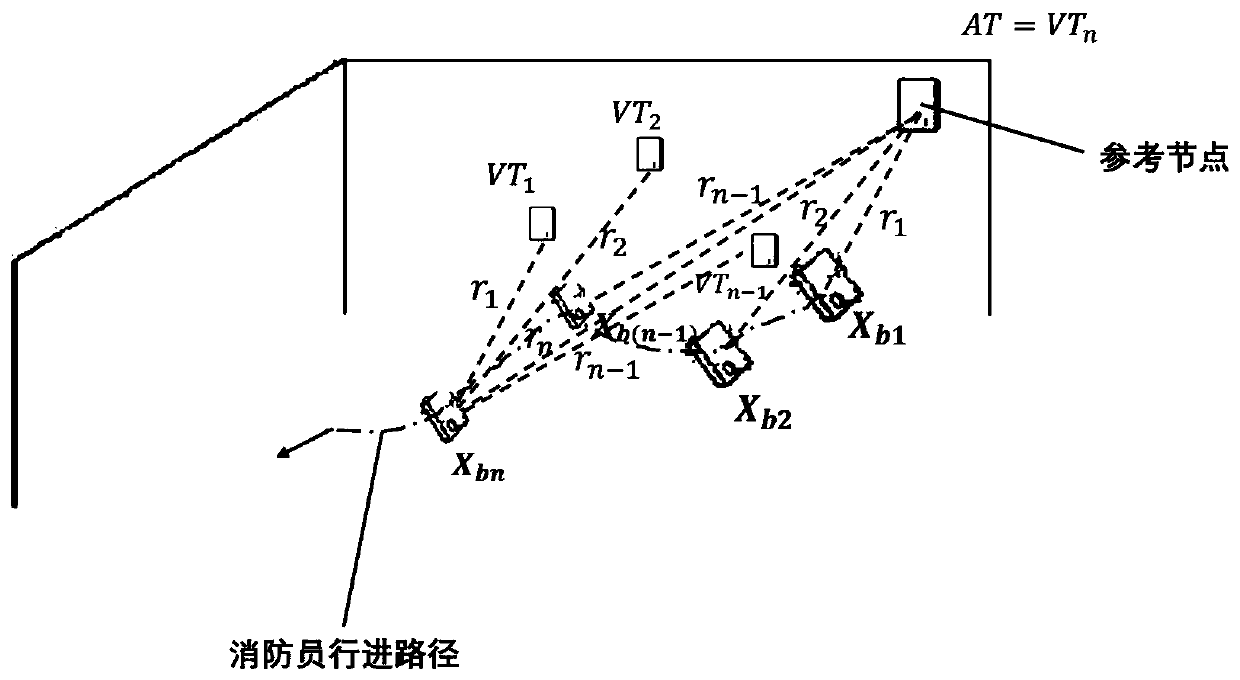
[0040] The specific implementation steps of the technical solution of the present invention are as follows: figure 1 As shown, the schematic diagram of virtual reference node array construction is shown in figure 2 As shown, the specific implementation steps are as follows:
[0041] 1. A single reference node is temporarily placed in the environment where rescue tasks are performed by firefighters who enter the fire scene.
[0042] 2. When the conditions for constructing a virtual reference node array are met, use the velocity and attitude information calculated by the three-axis accelerometer and three-axis gyroscope carried by the firefighter, combined with the location of the reference nodes, to construct a virtual reference node array.
[0043] Firefighters place a single reference node in the environment where rescue missions are performed, and let this reference node be the origin X of the firefighter's indoor navigation coordinate system AT =(x t ,y t ,z t ) T =(0,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More