

Man-machine moving obstacle monitoring method, readable storage medium and unmanned aerial vehicle
An obstacle and obstacle recognition technology, applied in the field of drones, can solve problems such as failure to realize unmanned and intelligent
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0045] The first embodiment of the present invention proposes a human-machine movement obstacle monitoring method, the method includes the following steps:
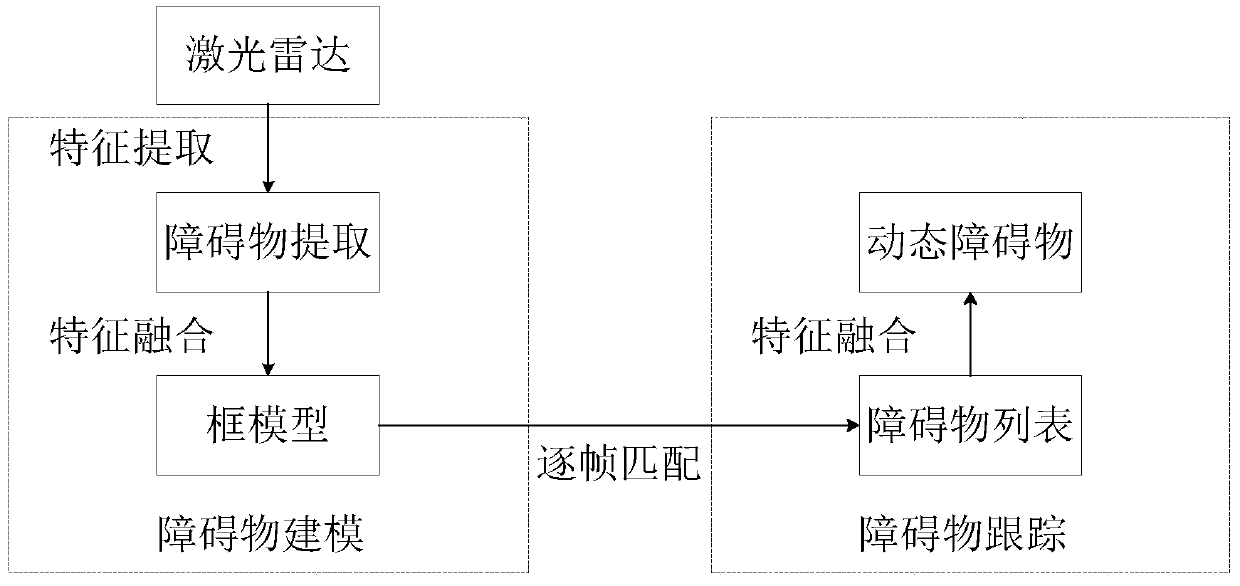
[0046] Obtaining obstacle features of obstacles through different sensors, and establishing frame models based on the obstacle features to identify obstacles;
[0047] An obstacle movement state model is constructed by fusing the obstacle recognition results of different sensors, and the obstacle is tracked based on the obstacle movement state model.
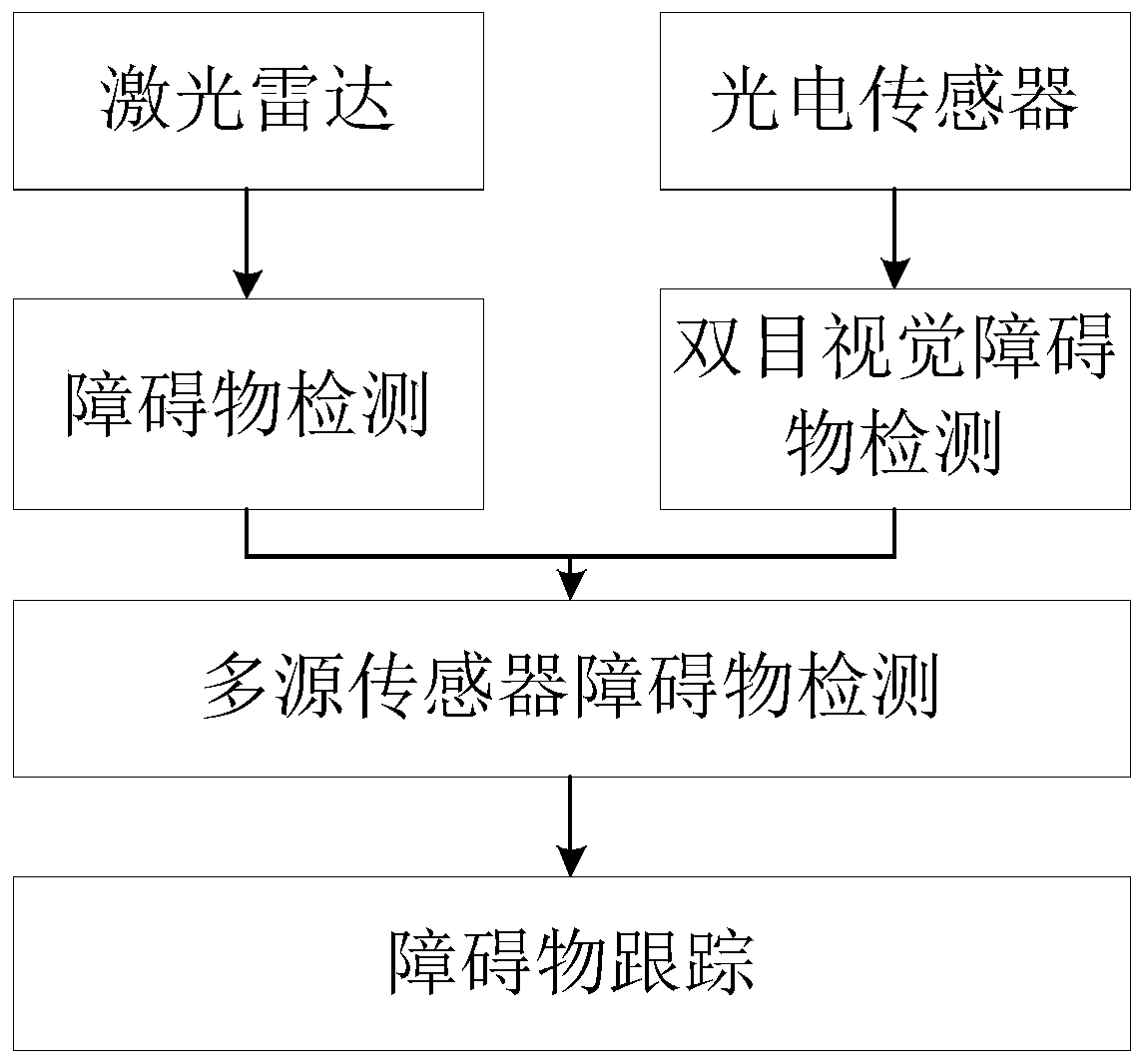
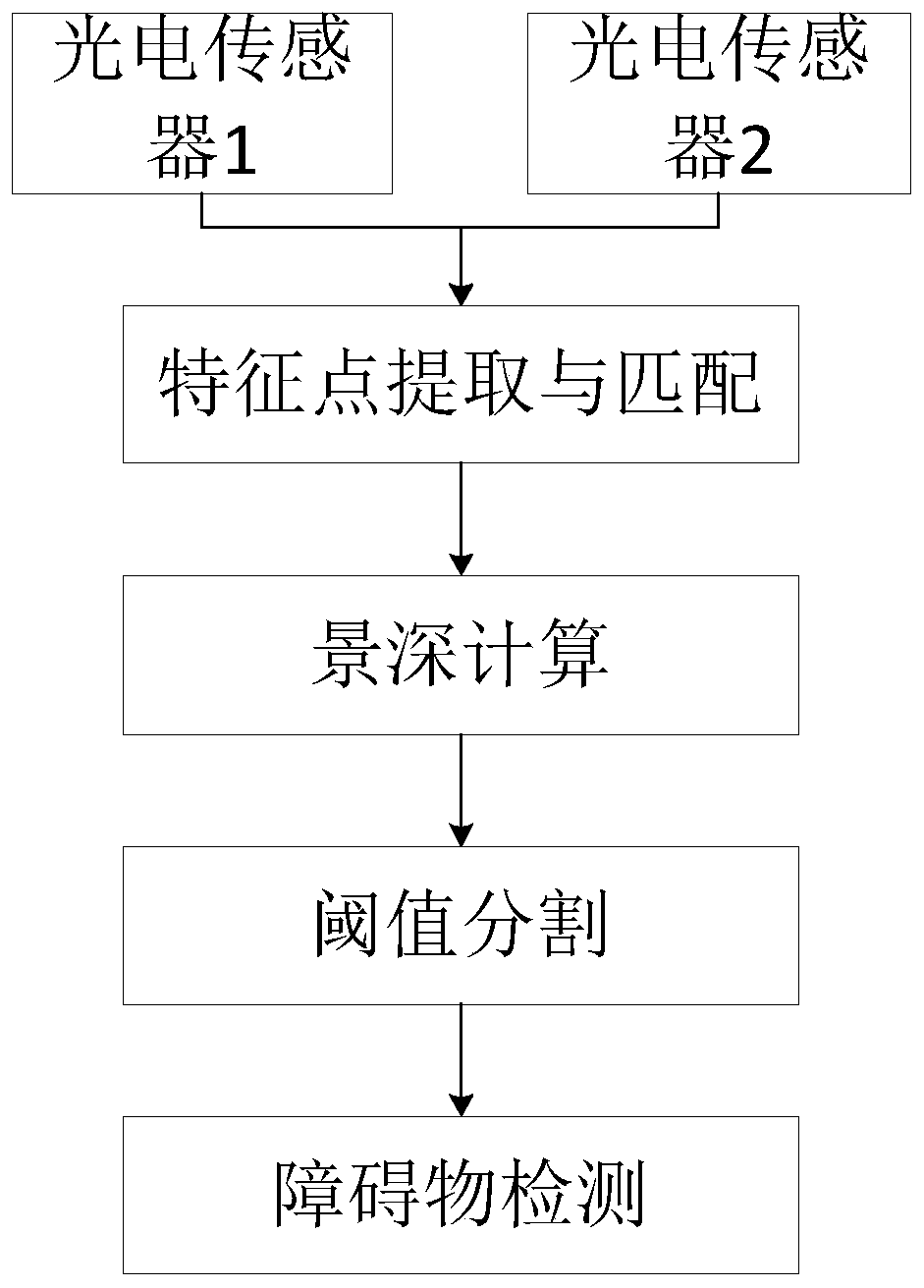
[0048] optional, such as figure 1 As shown, the acquisition of obstacle features of obstacles by different sensors includes: acquisition of obstacle features of obstacles by laser radar and binocular photoelectric sensors.
[0049] In the embodiment of the present invention, obstacles are identified by respectively establishing frame models based on the characteristics of the obstacles; the obstacle identification results of different sensors are fused to construct an obst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More