

Arc control method based on expected trajectory and disturbance compensation of motor position servo system
A servo system and motor position technology, applied in the direction of DC motor speed/torque control, control system, electrical components, etc., can solve the problem of uncertain nonlinearity of the motor position servo system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
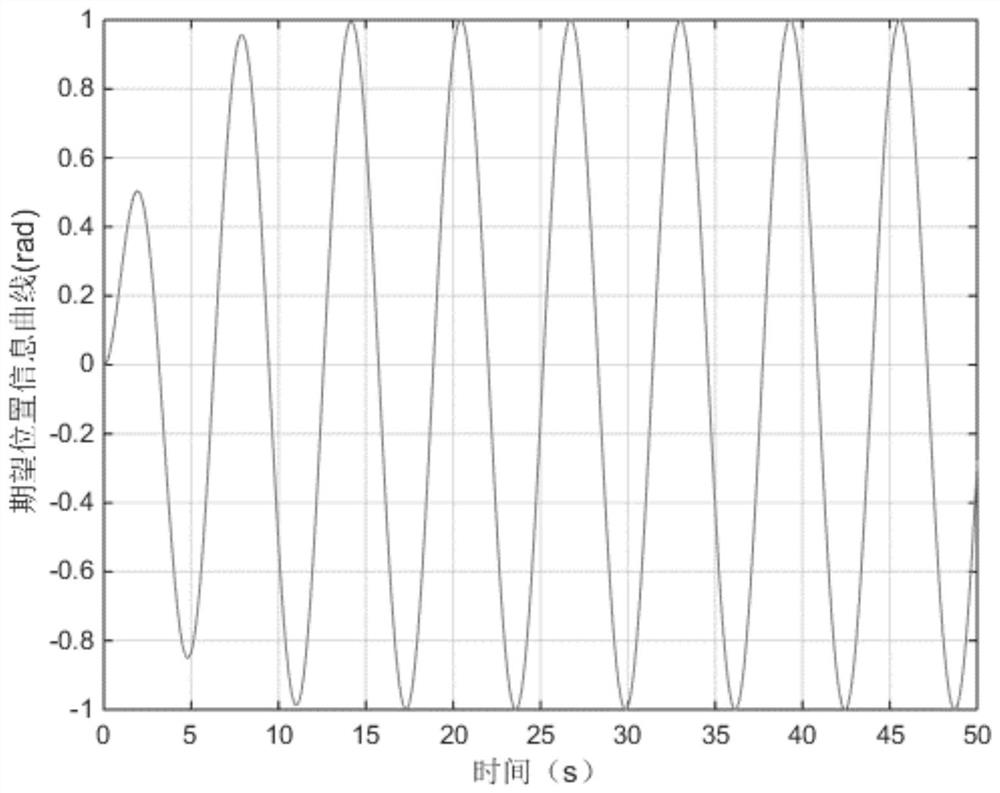
[0132] Simulation parameters: m=0.0146kg m 2 , B=0.25N·m·s / rad, K=56.8N·m / V. Take the controller parameter k 1 = 2,k 2 = 0.005, k = 0.8, k s2 =0.02, ε=0.01; system parameter true value θ=[2.5704e-004,0.0044] T , the upper and lower bounds of the estimation during parameter adaptation are θ max =[0.001,0.01] T , θ min =[1.0e-004,0.001] T , the parameter adaptive rate Γ=diag{0.004,0.004}, the estimated initial value of the selected θ is Slightly away from the true value of the parameter to evaluate the effect of the adaptive control law. Simulated interference d=0.005×x 1 ×x 2 , parameter upper bound δd p =0.5,k i =0.1,k d = 0.01. A given position is referenced to the input signal x 1d =(1-e -0.4×t )×sin(t), unit rad.
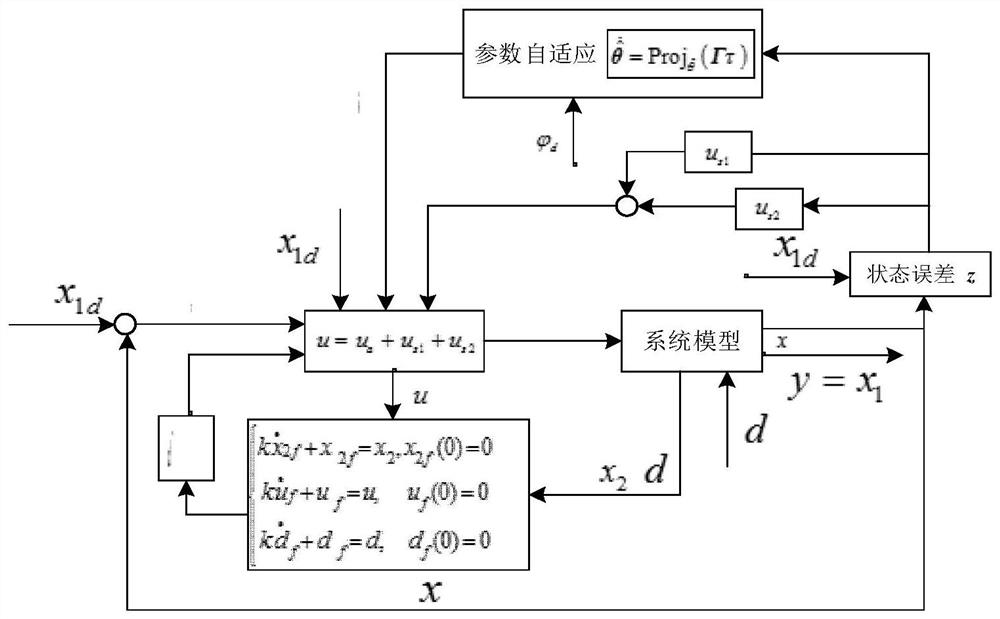
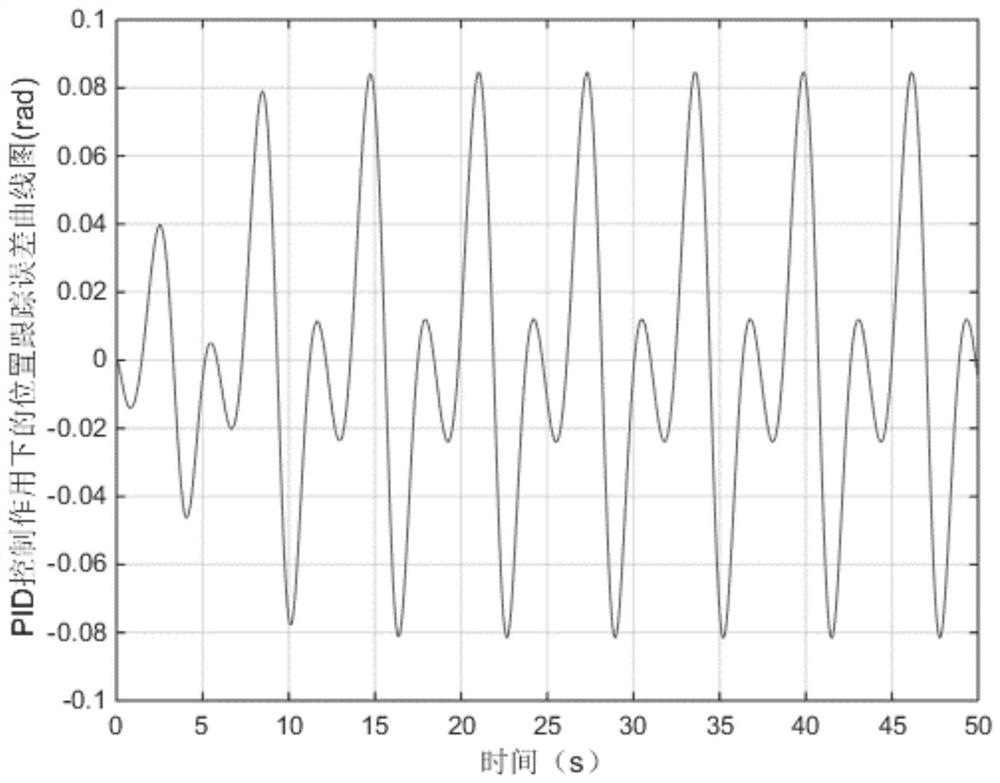
[0133] Depend on Figure 2 to Figure 8 It can be seen that the ARC control method based on the expected trajectory of the motor position servo system and the disturbance compensation proposed by the present invention can estimate the disturbance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More