

Explicit model forecast control-based flight path control method of unmanned surface vehicle
A technology of model predictive control and control method, applied in the direction of adaptive control, general control system, non-electric variable control, etc., can solve problems such as large amount of calculation and difficult real-time requirements, save hardware resources and reduce online computing time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
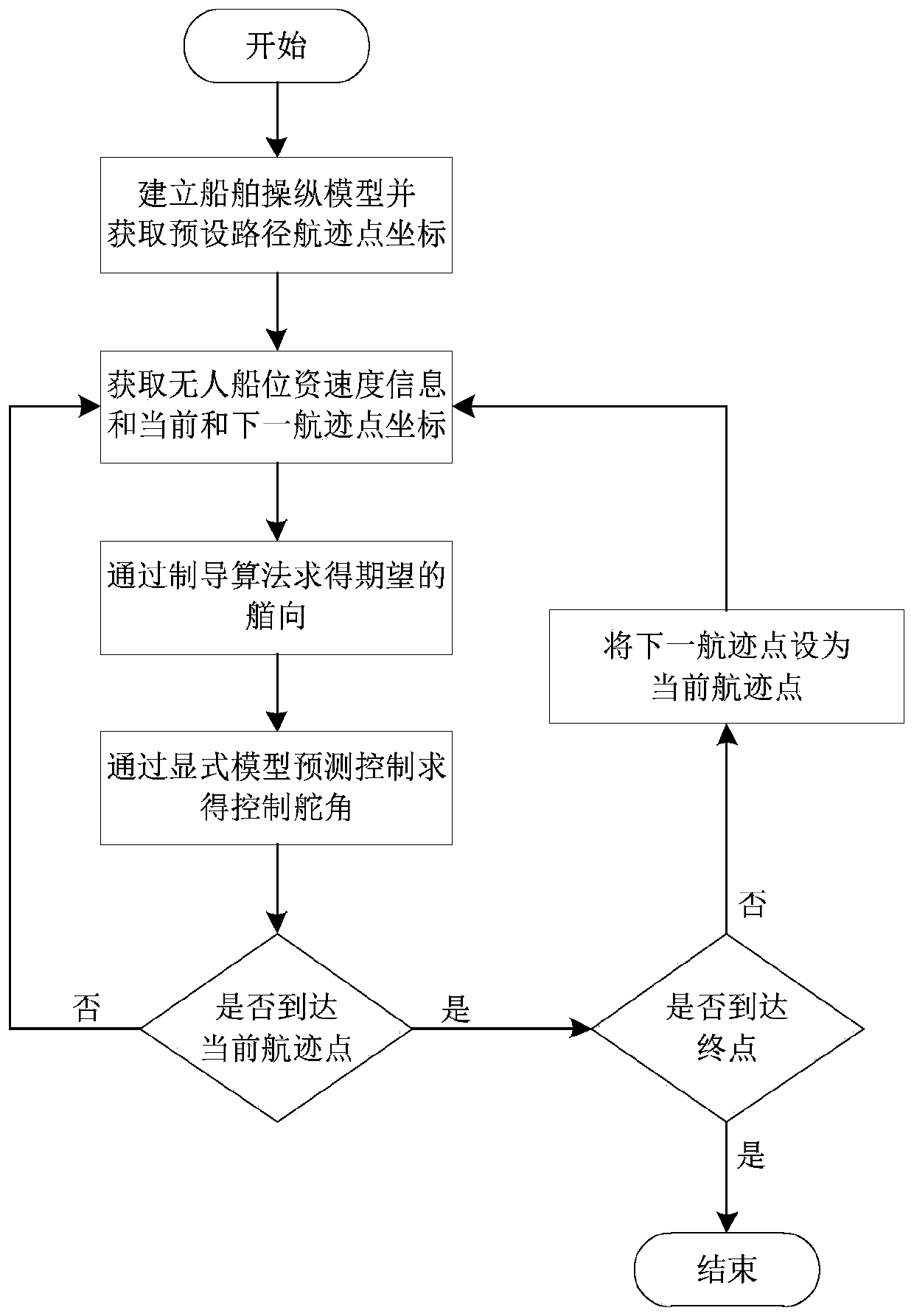
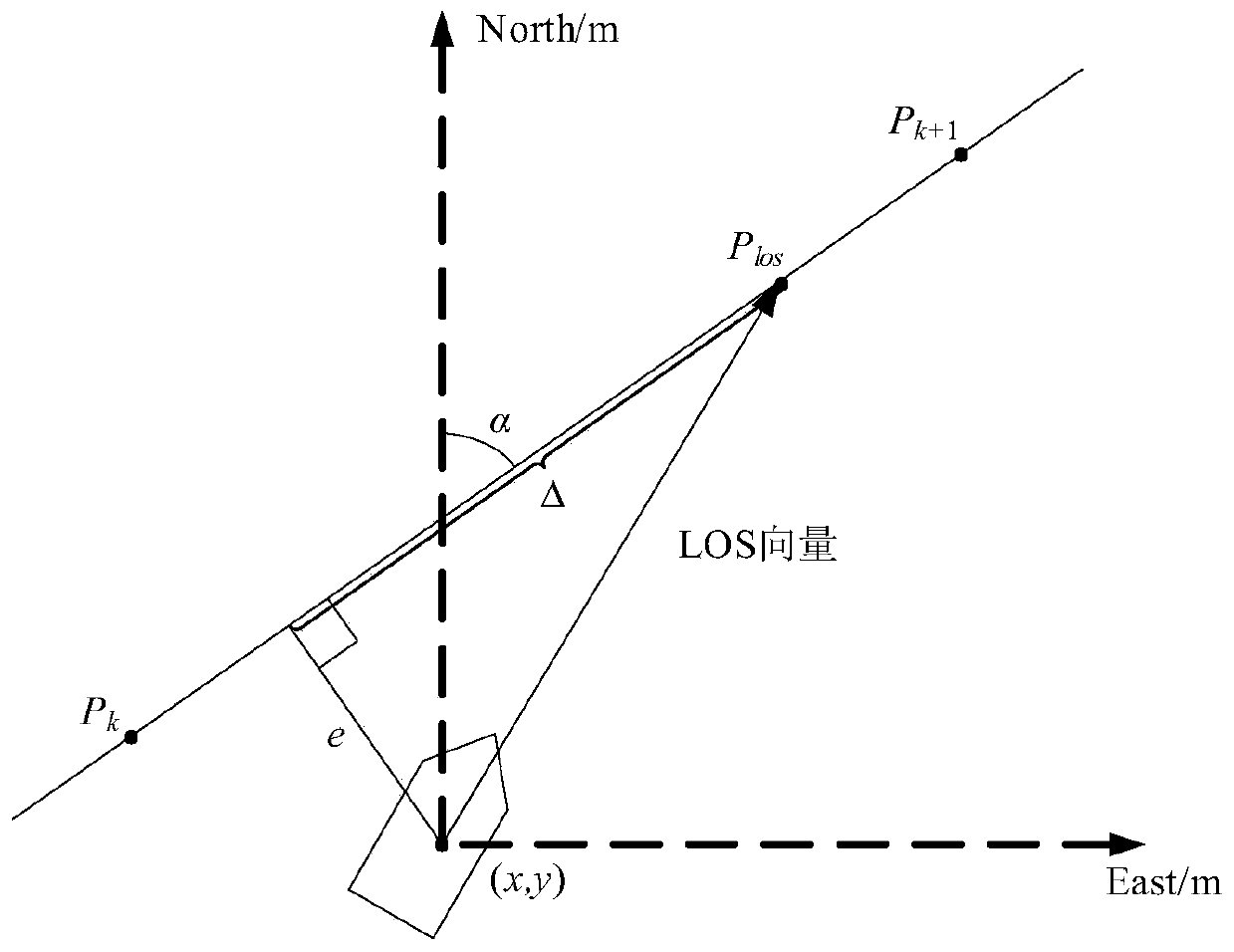
[0035] Such as figure 1 with figure 2 As shown, the unmanned ship track control method based on explicit model predictive control of the present invention comprises steps:
[0036] (1) Establish the three-degree-of-freedom maneuvering model of the surface unmanned ship, and construct the state space expression as the prediction model;
[0037] In order to describe the track control problem of the unmanned ship conveniently, considering the surge speed of the unmanned ship is a constant value, the three-degree-of-freedom maneuvering model of the unmanned ship is:
[0038]
[0039] In the formula, η=[x y ψ] T is the position vector of the unmanned ship, (x, y) is the position of the hull in the northeast coordinate system, ψ is the heading angle; ν=[u c v r] T is the velocity vector of the unmanned ship, u c is the su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More