

Fixed time control method considering parameter uncertainty and interference of mechanical arm
A technology with uncertain parameters and fixed time, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of reduced speed regulation performance, jitter, complicated design, etc., to solve time lag, reduce precision, and eliminate discontinuity , to ensure the effect of effective performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
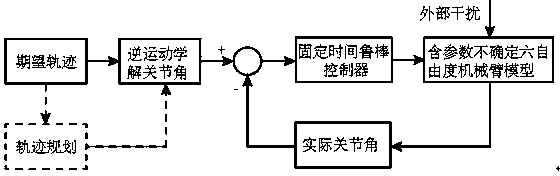
[0038] A fixed-time control method considering the uncertainty and disturbance of the manipulator parameters is a new fixed-time robust control method. The control signal is a continuous non-smooth control signal, which realizes the fixed-time tracking of the joint angle and angular velocity of the manipulator.
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0040] Step 1. Considering the parameter uncertainty of the manipulator and the external interference to the system, establish a dynamic model of the six-degree-of-freedom manipulator:
[0041] (1)
[0042] In the formula, Represent the joint angle, angular velocity, angular acceleration vector respectively; represents the positive definite symmetric inertia matrix; represent the centrifugal force and the Coriolis force vector; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More