

Pneumatic bionic wall climbing travelling device capable of crossing outer wall
A walking device and wall technology, which is applied in the field of bionic robots, can solve problems such as unstable adsorption force and difficulty for wall-climbing robots to cross adjacent outer wall surfaces, so as to eliminate potential safety hazards, improve the scope and effect of use, and enhance the adsorption capacity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
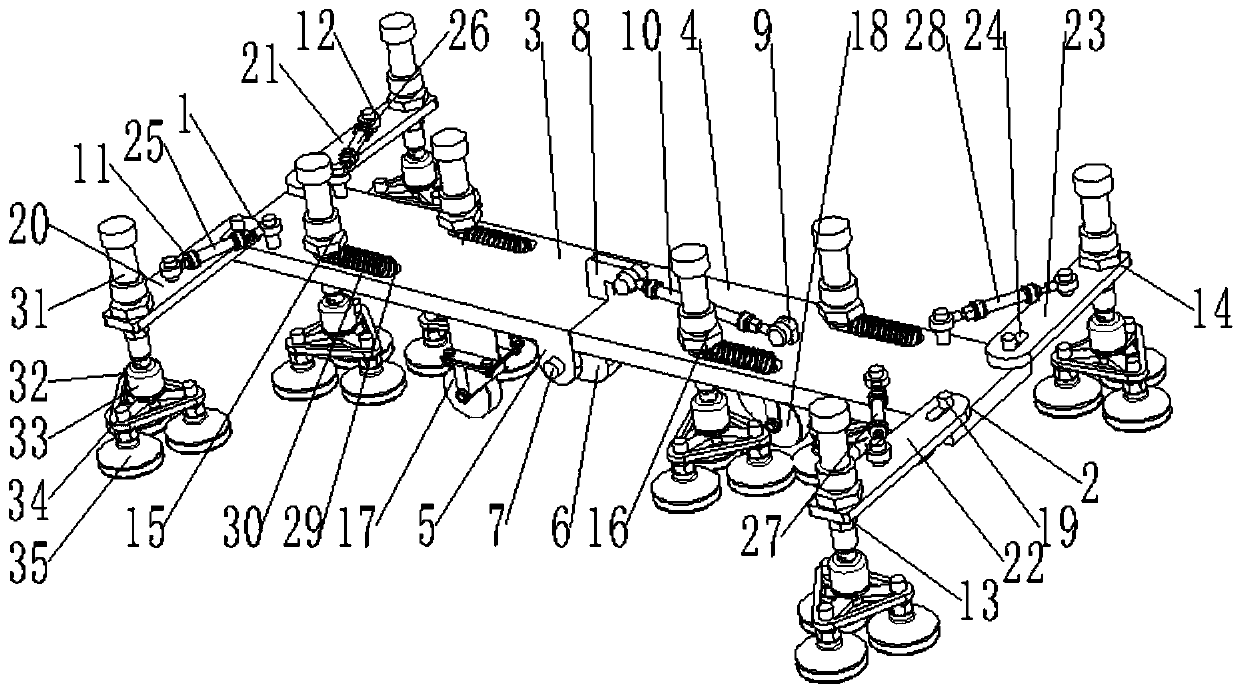
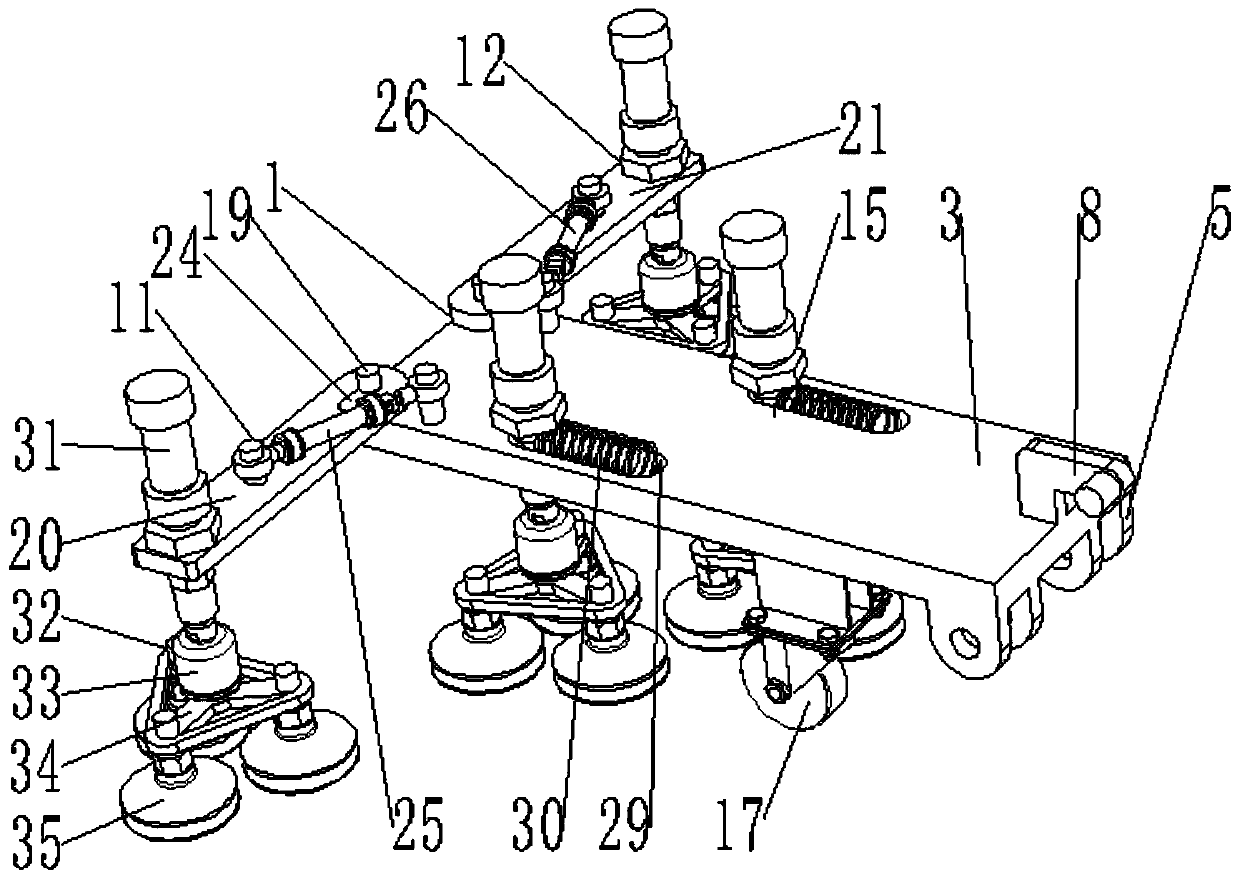
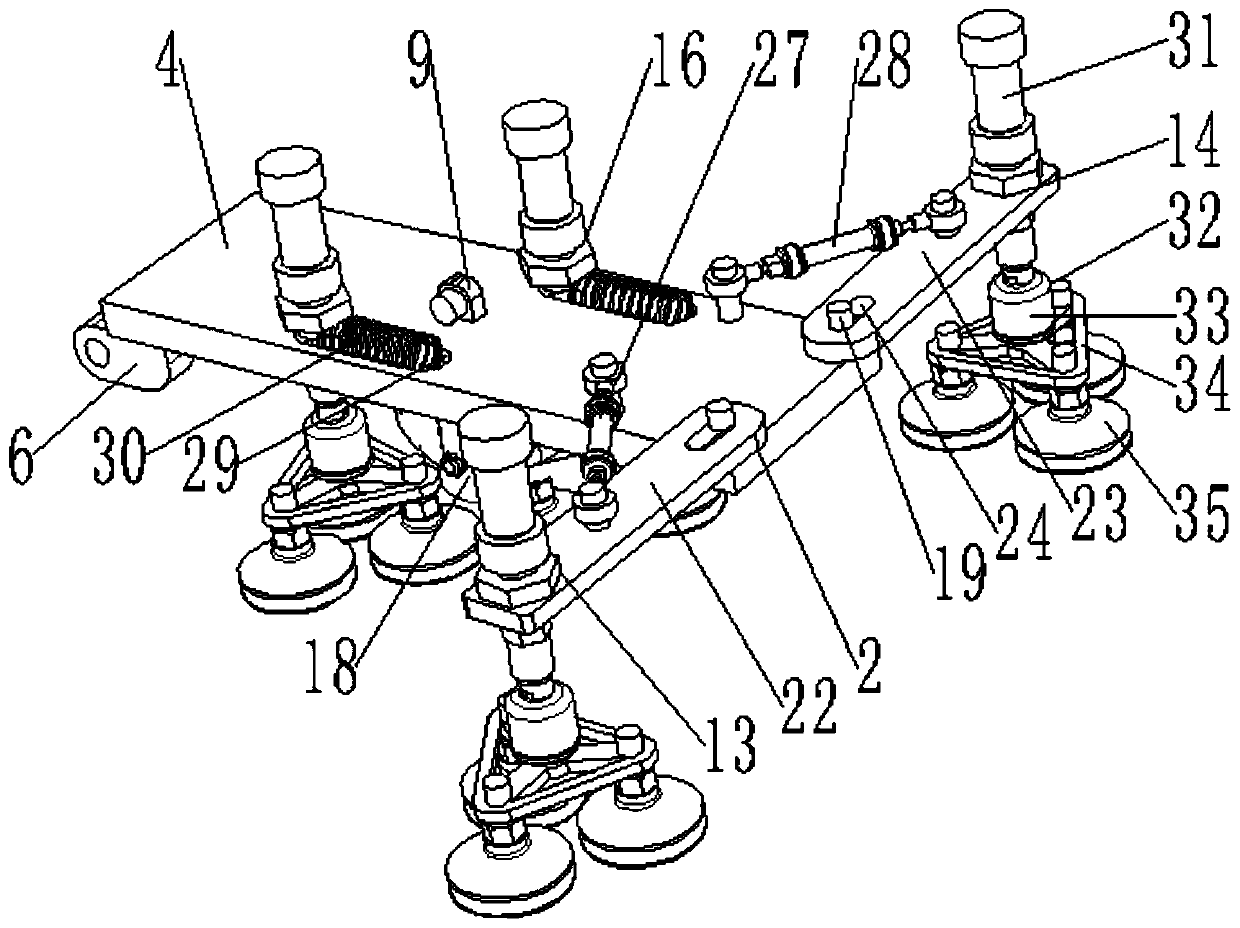
[0050] Such as Figure 1 to Figure 4 As shown, the present invention provides a kind of pneumatic bionic wall-climbing walking device that can cross the outer wall, comprising:
[0051] The forelimb mechanism 1 and the hindlimb mechanism 2 comprise the forelimb base plate 3 and the hind limb base plate 4 respectively, and the lower side of one end of the forelimb base plate 3 and the hind limb base plate 4 are respectively provided with a forelimb pin support 5 and a hind limb pin support 6, and a forelimb pin support 5 The inside of the pin support 6 of the hind limbs is provided with a rotating shaft 7, and the upper side of the forelimb base plate 3 is connected to the end of the hind limb base plate 4. A forelimb cylinder support 8 is provided, and the outer end of the forelimb cylinder support 8 extends out of the forelimb base plate 3. Outside the end, the middle part of the upper side of the hind limb base plate 4 is provided with a hind limb cylinder support 9, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More