

Barrier-avoiding robot capable of walking in space pipeline and method
A walking robot and barrier-type technology, which is applied in the field of barrier-type space pipeline walking robots, can solve problems such as the inability of robots to complete crawling work and dangerous working environments, and achieve low maintenance costs, simple structure, and sufficient walking methods Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
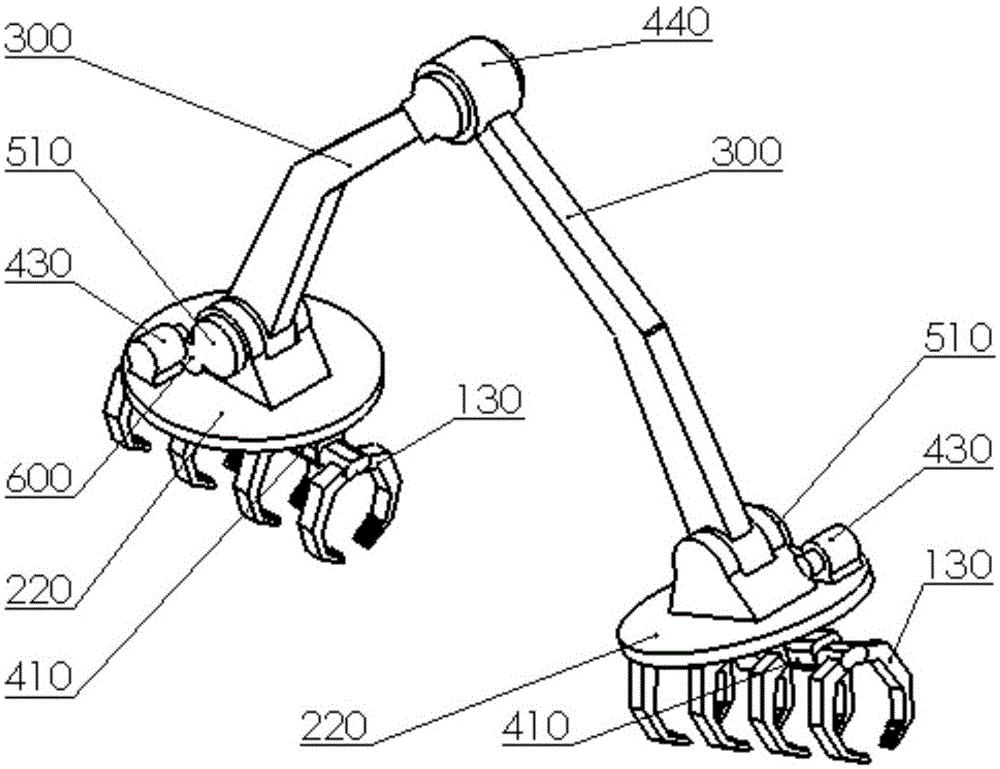
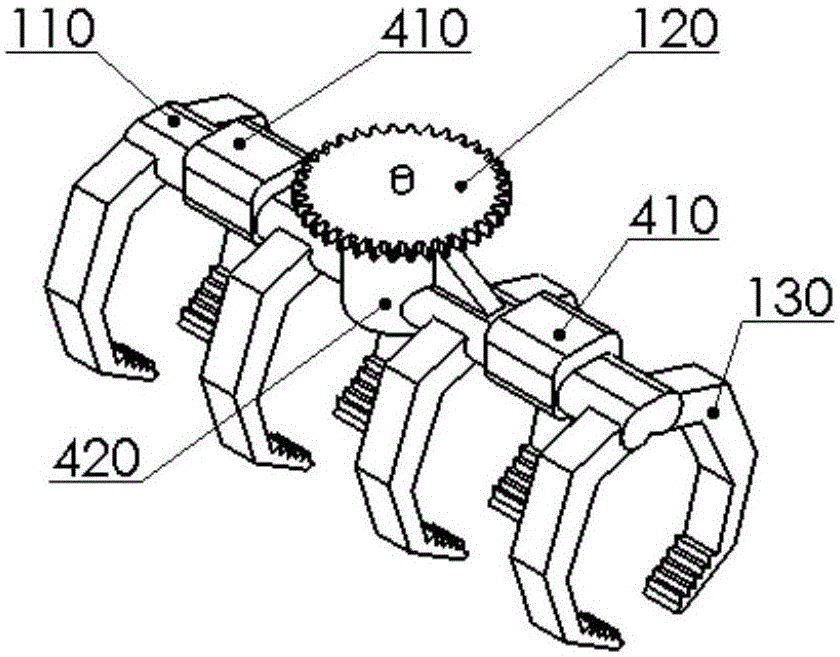
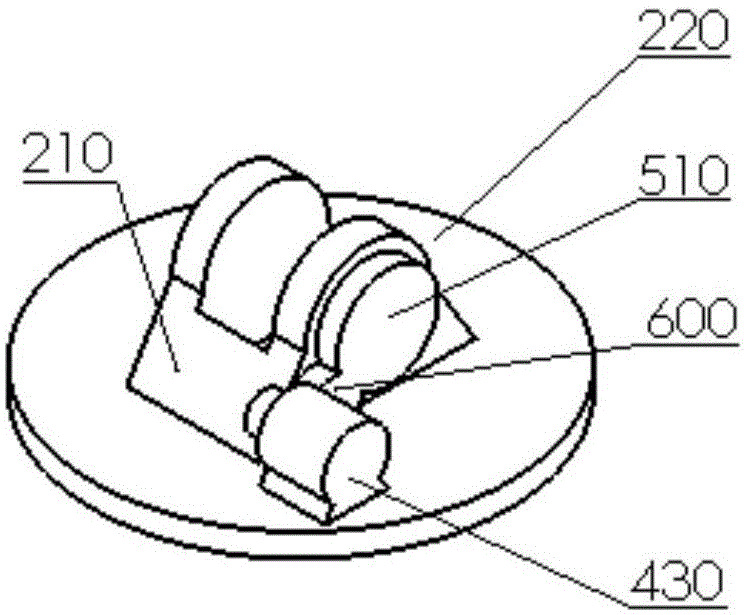
[0022] Embodiment 1, Figure 1 to Figure 5 Provided is a barrier-type space pipeline walking robot and method; the barrier-type space pipeline walking robot includes claws 100, a base 200, a telescopic arm 300, a drive motor (including a telescopic motor 440, a wall pendulum motor 430, a clamp Claw driving motor 410, base rotating motor 420), speed reducer, clutch 600, controller.
[0023] The barrier-type space pipeline walking robot of the present invention consists of two telescopic arms 300 to form a walking structure, which is arranged in an approximately symmetrical design, and its lower end is attached to the outer pipe wall in an open-jaw manner by setting claws 100, and thus Complete various movements of forward or backward.
[0024] like figure 1 As shown, in the present invention, two telescopic arms 300 are used. For the sake of clarity, they are respectively expressed as the main telescopic arm and the auxiliary telescopic arm; the main telescopic arm and the au...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More