Unmanned aerial vehicle swarm takeoff and landing control method, unmanned aerial vehicle swarm takeoff and landing control device, computer equipment and storage medium
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
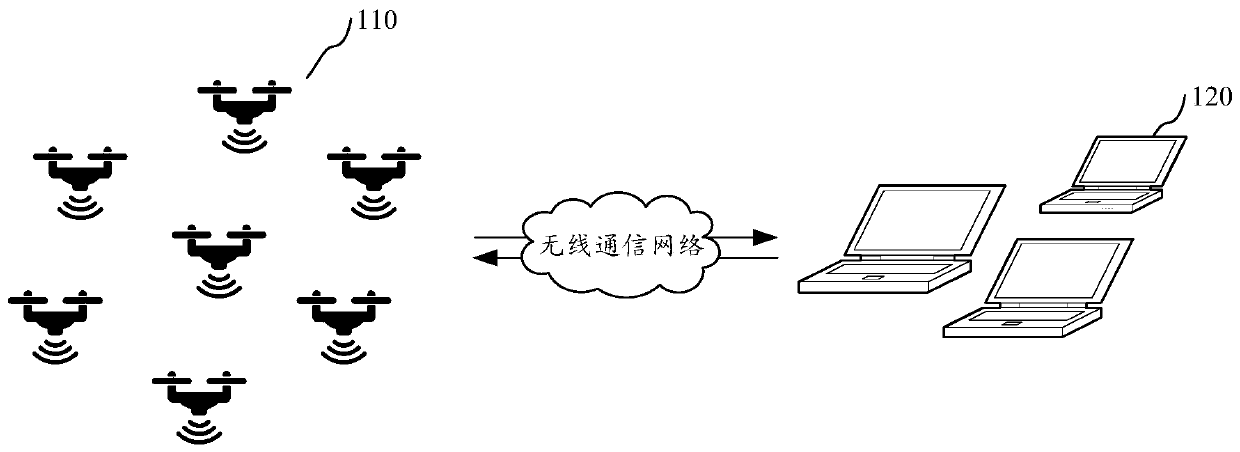
[0059] The UAV cluster take-off and landing control method provided by the embodiment of the present invention can be applied to such as figure 1 shown in the application environment. Wherein, the UAV cluster 110 includes a large number of UAVs, and the UAVs are provided with a wireless communication module for connecting to a wireless communication network. The UAV swarm ground station 120 can obtain the cruising position information of the UAV swarm 110 through the wireless communication network, and is used for unified take-off and landing control and scheduling of the...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap