

Travel target point identification method and device, and model development and evaluation method and device
A technology for identifying models and evaluating methods, which is applied in the field of data processing and can solve problems such as the inability to effectively reflect the fit of classification models.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
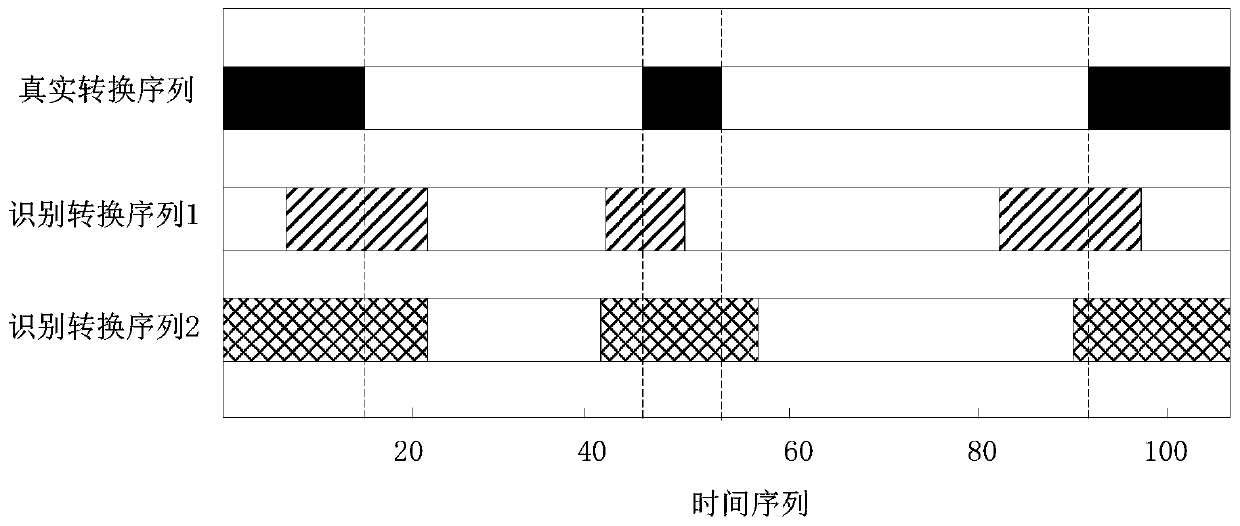
[0040] Among the current identification methods for transfer points in the process of traffic travel, the more accurate and fast method is to identify the transfer points through the classification model. There is an error between the sequence and the sequence formed by the real transfer point, such as figure 1 As shown, two transition point sequences identified by the classification model are listed, and the identified transition point sequences are compared with the real transition point sequences, from figure 1 It can be seen that there is a dislocation and expansion in the time series between the recognition transition point sequence identified by the existing model and the real transition point sequence.
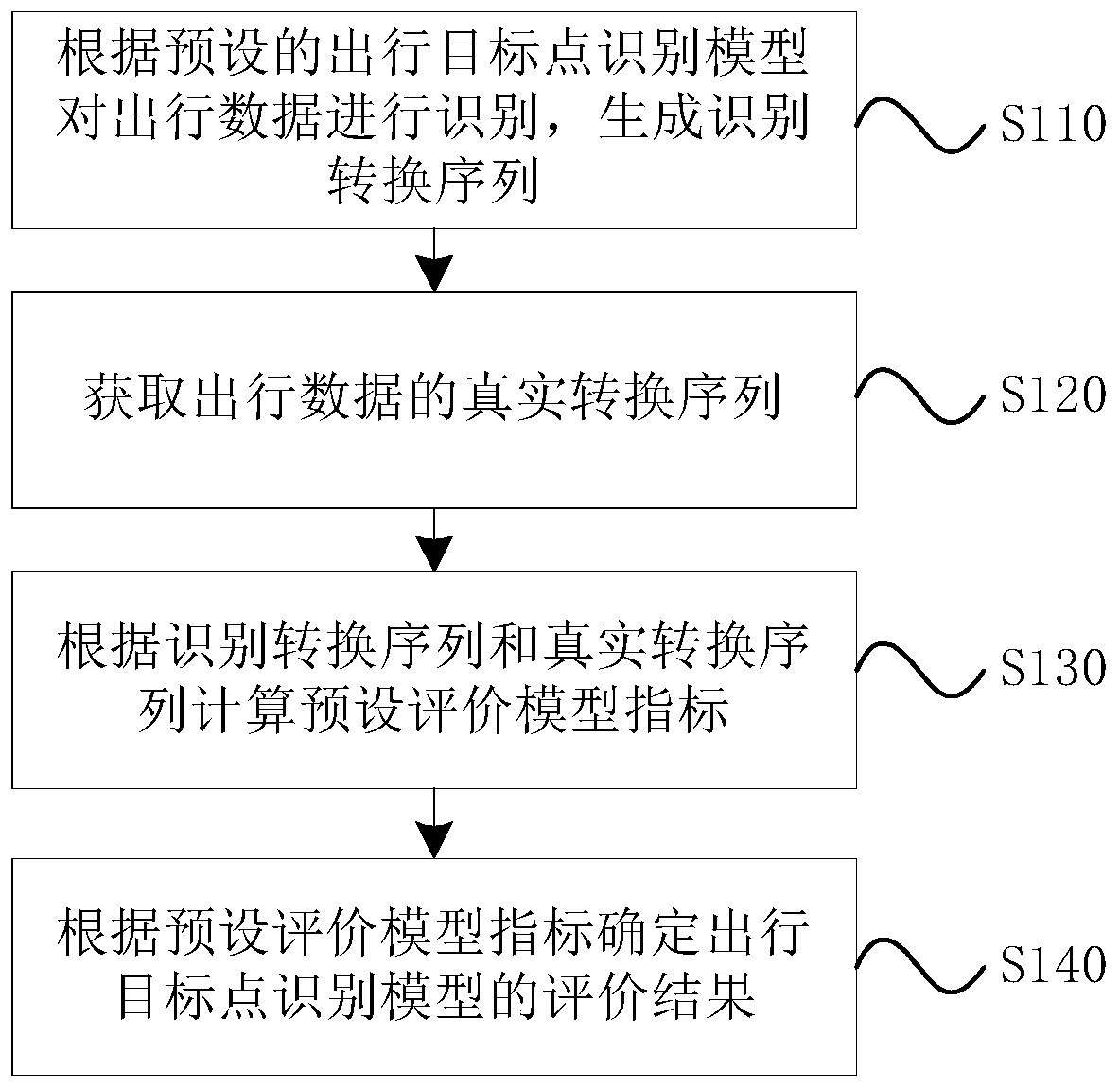
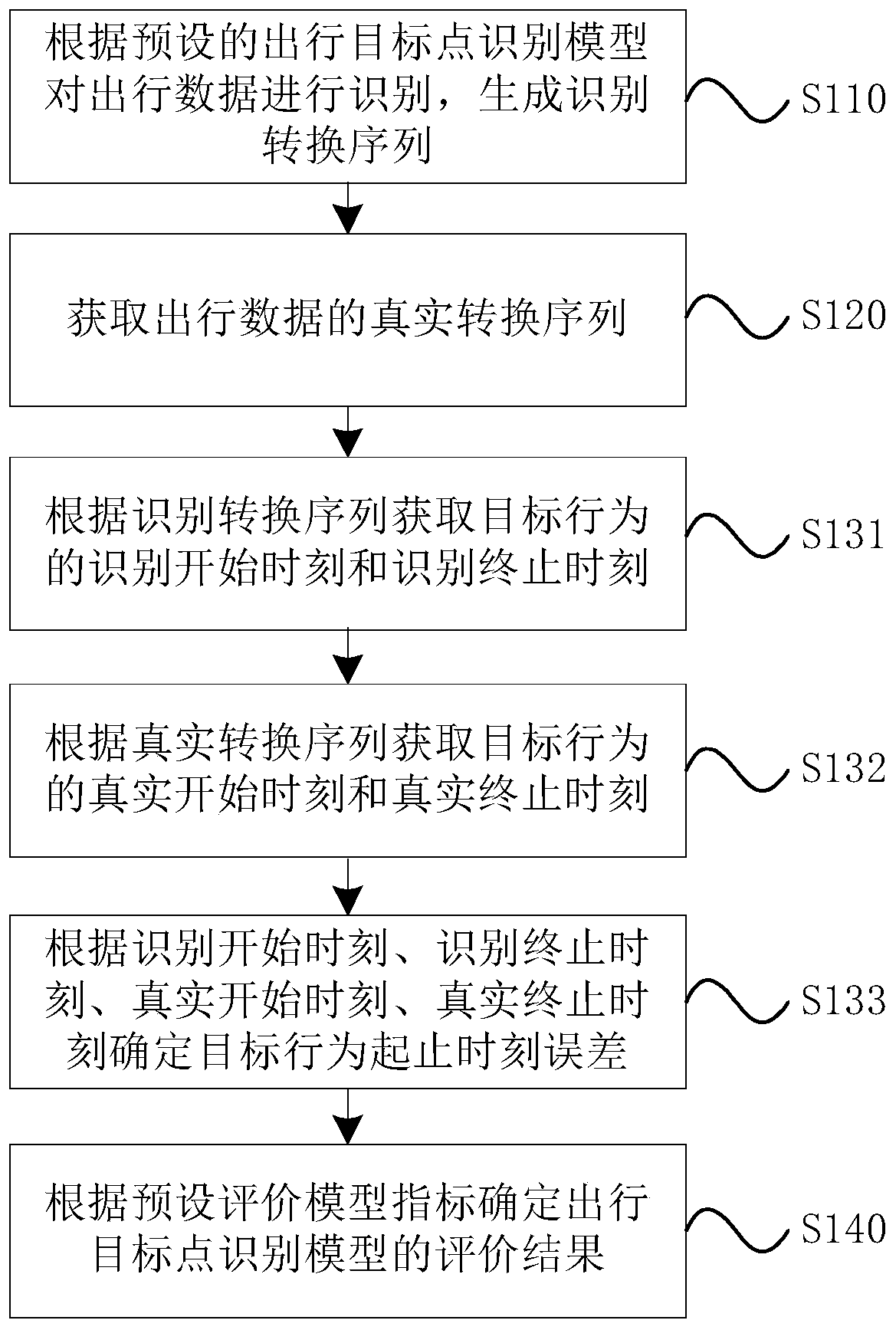
[0041] An embodiment of the present invention provides a method for evaluating a travel target point recognition model, such as figure 2 shown, including the following steps:
[0042] Step S110: Identify the travel data according to the preset travel target point rec...
Embodiment 2
[0081] An embodiment of the present invention provides a method for developing a travel target point recognition model, such as Figure 7 shown, including:
[0082] Step S210: Obtain multiple pieces of travel data, the travel data includes a training set and a verification set, wherein each piece of travel data consists of multiple sampling points.
[0083] Step S220: Extract the feature values of each sampling point in the training set and the feature values of each sampling point in the verification set.
[0084] In a specific embodiment, the eigenvalue of each sampling point is calculated based on the sampling point sequence formed by N time length windows before and after the sampling point, when the eigenvalues of the N sampling points before and after the travel data, the point Since the window calculation conditions are not satisfied, its eigenvalues cannot be calculated. In this embodiment, referring to the padding algorithm of the filter in the convolutional ...
Embodiment 3
[0115] An embodiment of the present invention provides a method for identifying travel target points, such as Figure 13 shown, including:
[0116] Step S310: Obtain travel data to be predicted, each travel data is composed of multiple sampling points;
[0117] Step S320: Extract the feature values of each sampling point in the travel data to be predicted. For detailed description, see the description of step S220 in the above-mentioned embodiment 2.
[0118] Step S330: Input the characteristic value of each sampling point in the travel data to be predicted into the travel target point recognition model to obtain the target point sequence. The travel target point recognition model is obtained according to the travel target point recognition model development method provided in the above-mentioned embodiment 2, described in detail See the description of the travel target point recognition model development method in the above-mentioned embodiment 2.
[0119] The travel targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More