

Mechanical leg of lower limb rehabilitation robot
A rehabilitation robot and mechanical leg technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of low perception sensitivity and strangulation of patients' legs, and achieve the goal of avoiding strangulation, facilitating rehabilitation training of lower limbs, and stabilizing knee connection Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
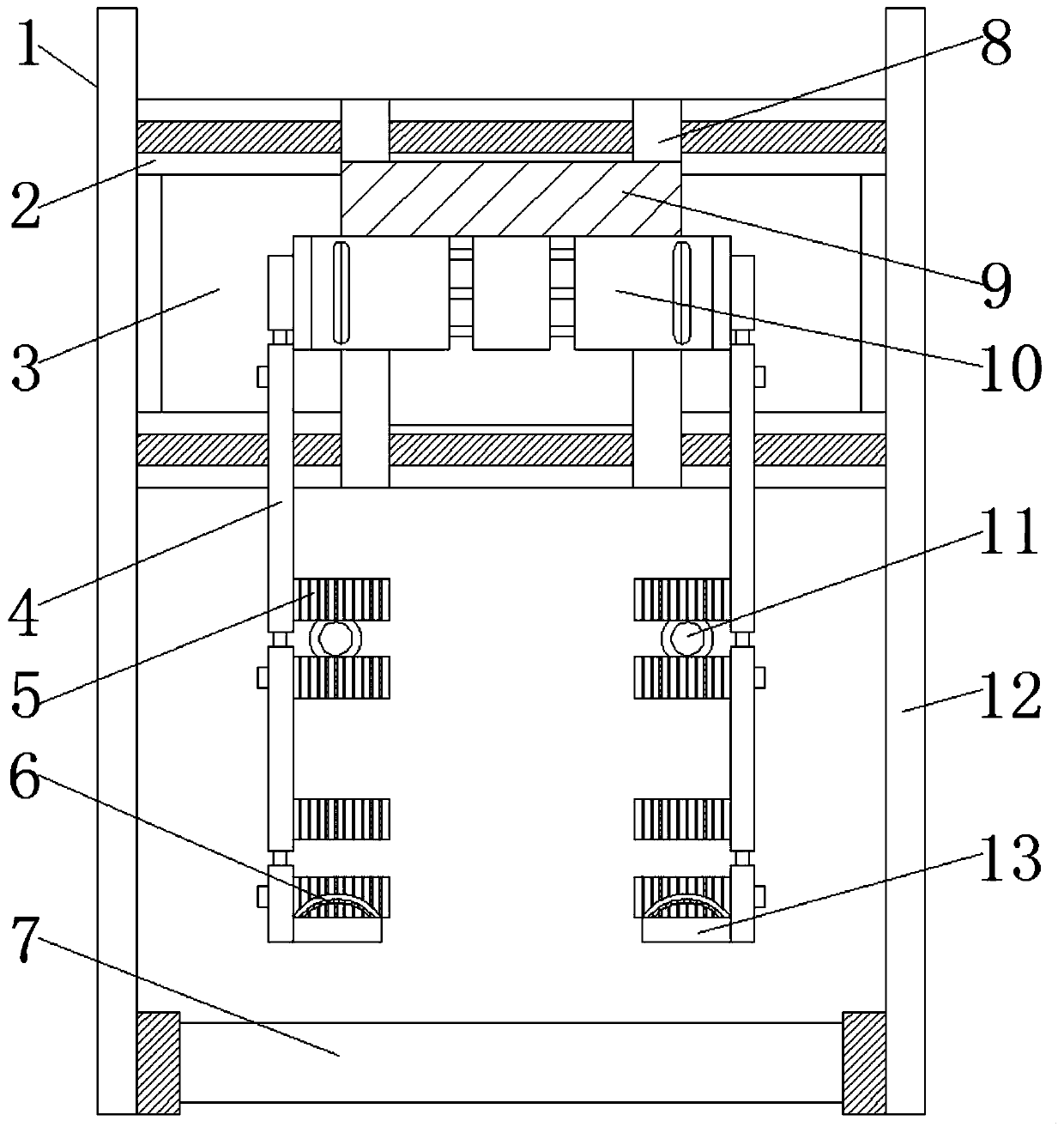
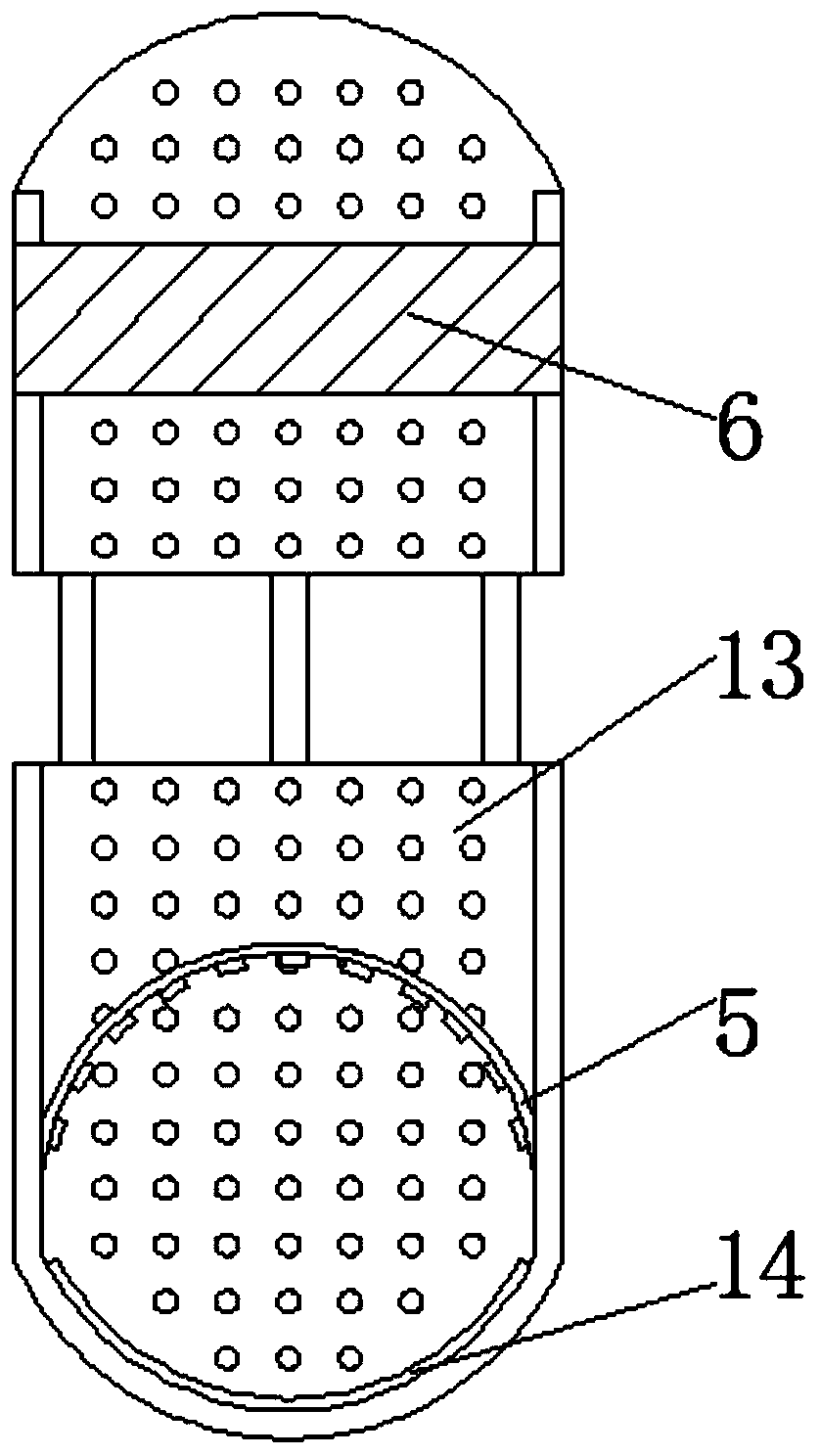
[0020] Embodiment 1: One side of the strap 5 is provided with a strip-shaped inflatable protrusion, and two of the straps 5 are connected with a knee shield 11 through a buckle. The strip-shaped inflatable protrusion of the strap 5 in this structure can increase the The elasticity of the strap 5 enables the strap 5 to securely fix the lower limbs of the user on the main body 1 of the mechanical leg, and at the same time avoid strangulation of the user's leg caused by the strap being too tight.
Embodiment 2
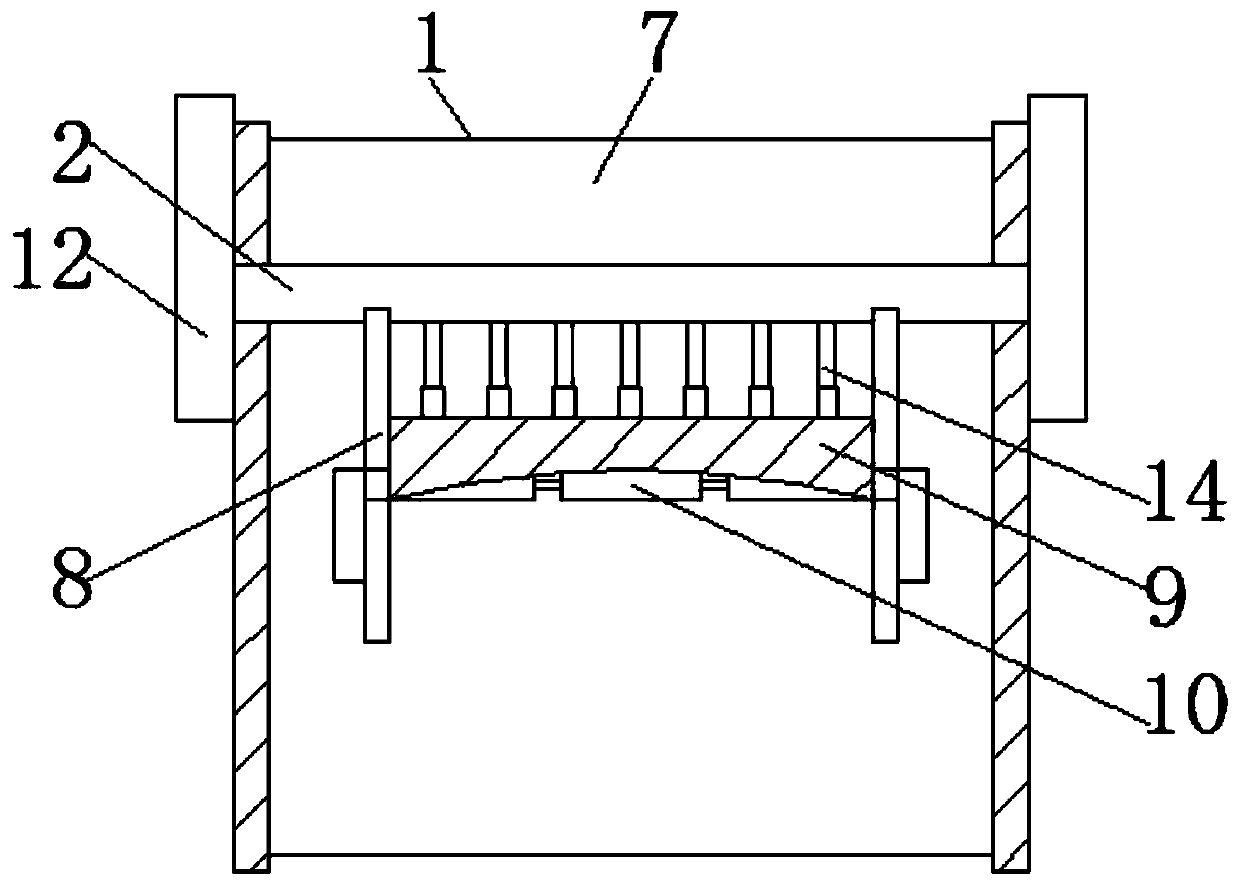
[0021] Embodiment 2: The fixed rod 14 is a telescopic rod structure, and the fixed rod 14 is connected with the fixed plate 3 and the waist support 9 through bolts. When the adjustment rod 8 is moved and adjusted in this structure, the fixed rod 14 will not be affected, so that the mechanical leg The main body 1 can be used more conveniently, and the waist support 9 is connected to the fixed rod 14. One side of the waist support 9 is an arc structure, and the waist support 9 is also made of rubber material. At the same time, the rubber material can play the role of waist support to avoid damage caused by the force on the waist.
[0022] Working principle: When using the mechanical legs of the lower limb rehabilitation robot, firstly when the user needs to perform leg training, the adjustment rod 8 can be adjusted on the first support frame 2 to adapt to the waistline of the user, and at the same time the first support frame 2. The height can be adjusted on the second support f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More