

Robust differential game control method for multi-robot on-orbit assembly attitude stability.
A multi-robot, stable control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as the inability to guarantee optimality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
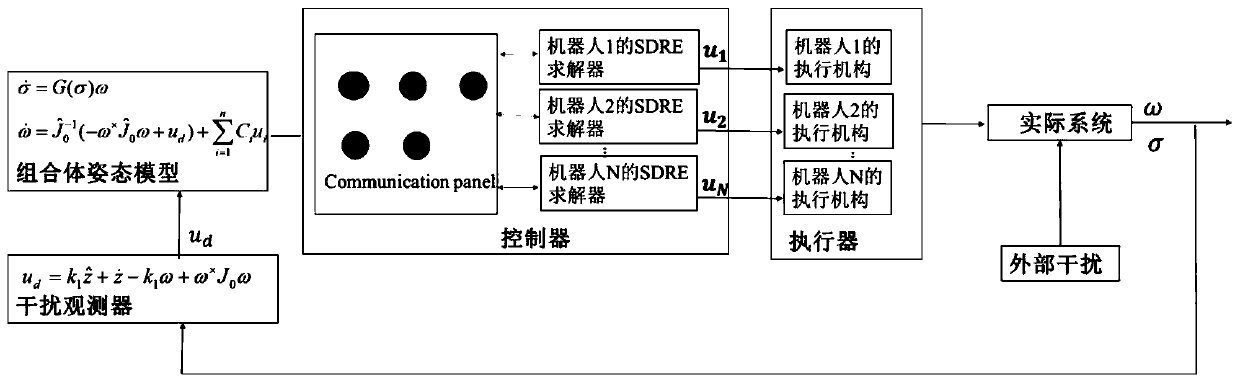
[0033] The invention aims at the assembly body and the combination formed by a plurality of robots, and models the attitude stability control problem with interference as a game problem among the multi-robots. The attitude dynamics model of the assembly is established by using the moment of inertia obtained from the identification; the uncertain dynamics of the model uncertainty and external disturbance torque are obtained by using the disturbance observer observation, and the attitude dynamics model is improved; then the above attitude dynamics model Written in state-dependent form. The differential game model is established by using the state-related attitude dynamics model of the assembly and the performance index functions of each robot; after that, the HJ equation is obtained and solved by optimizing the performance index functions, and the expression of the state feedback control strategy can be obtained, which can be used directly online.
[0034] In the present inventi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More