

Multi-objective optimization-based unmanned vehicle motion planning method
An unmanned vehicle, multi-objective optimization technology, applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve problems such as difficult to determine the weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
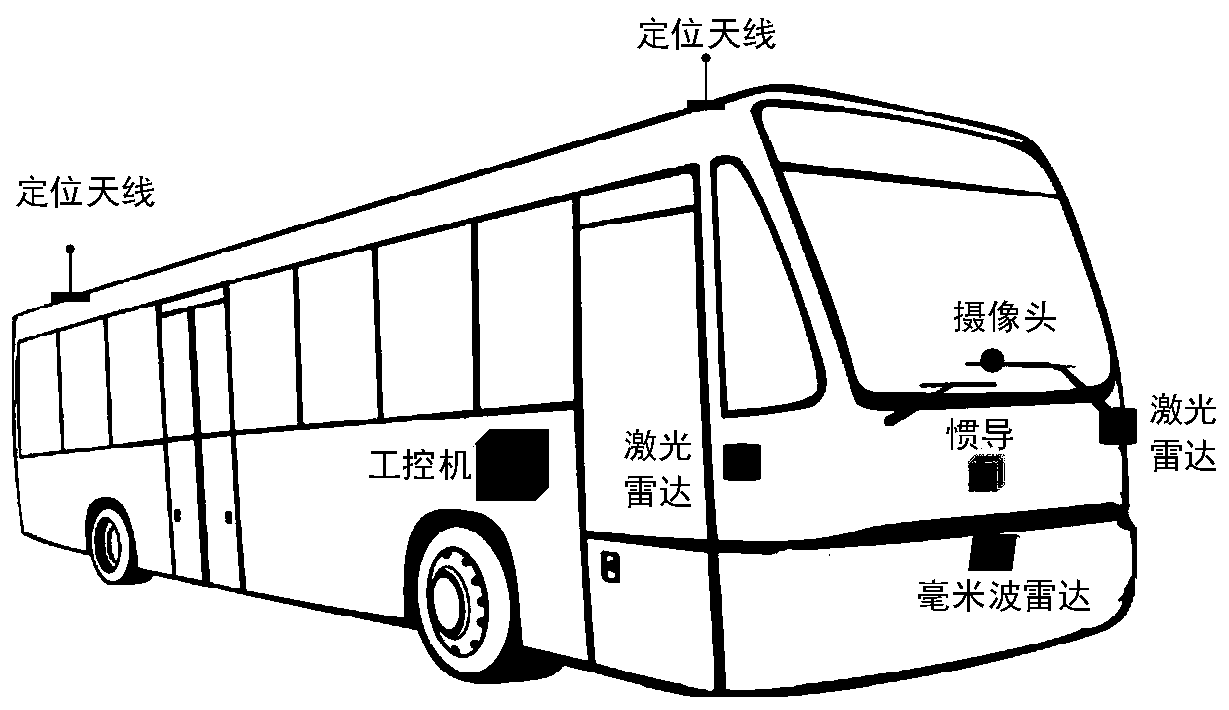
[0055] The present embodiment adopts the intelligent car that length 12m, wide 2.5m bus are refitted, and infrared transceiver, lidar, millimeter-wave radar, camera and GPS / IMU system are housed.
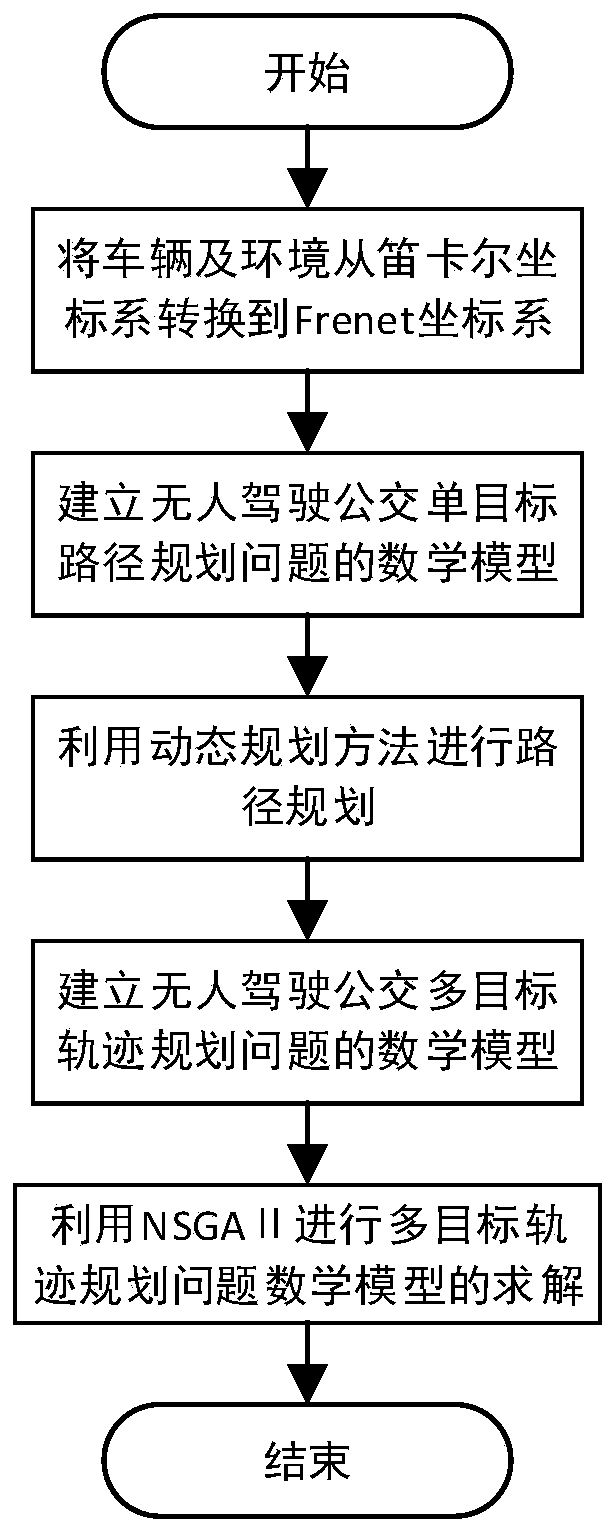
[0056] A multi-objective optimization-based unmanned vehicle motion planning method based on the NSGA II algorithm in an urban road environment, comprising the following steps:
[0057] Step 1: Map the vehicle and the environment from the Cartesian coordinate system to the Frenet coordinate system. The following path planning and trajectory generation are all performed in this coordinate system;
[0058] Step 2: Using the weighted sum of smoothing cost, obstacle cost, and reference line cost as the evaluation index, establish a mathematical model for the multi-objective path planning problem of unmanned vehicles;
[0059] Step 3: use the linear dynamic programming method for path planning, solve the mathematical model of the multi-objective path planning problem, and obtain the path...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More