

A control method, terminal equipment, and storage medium for an automatic brake assist system
An auxiliary system and automatic braking technology, applied in the direction of automatic starting devices, brakes, vehicle parts, etc., can solve the problems of collision risk, many vehicles, complex and changeable working conditions, etc., to avoid collision accidents, reduce the degree of damage, improve The effect of safety and convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
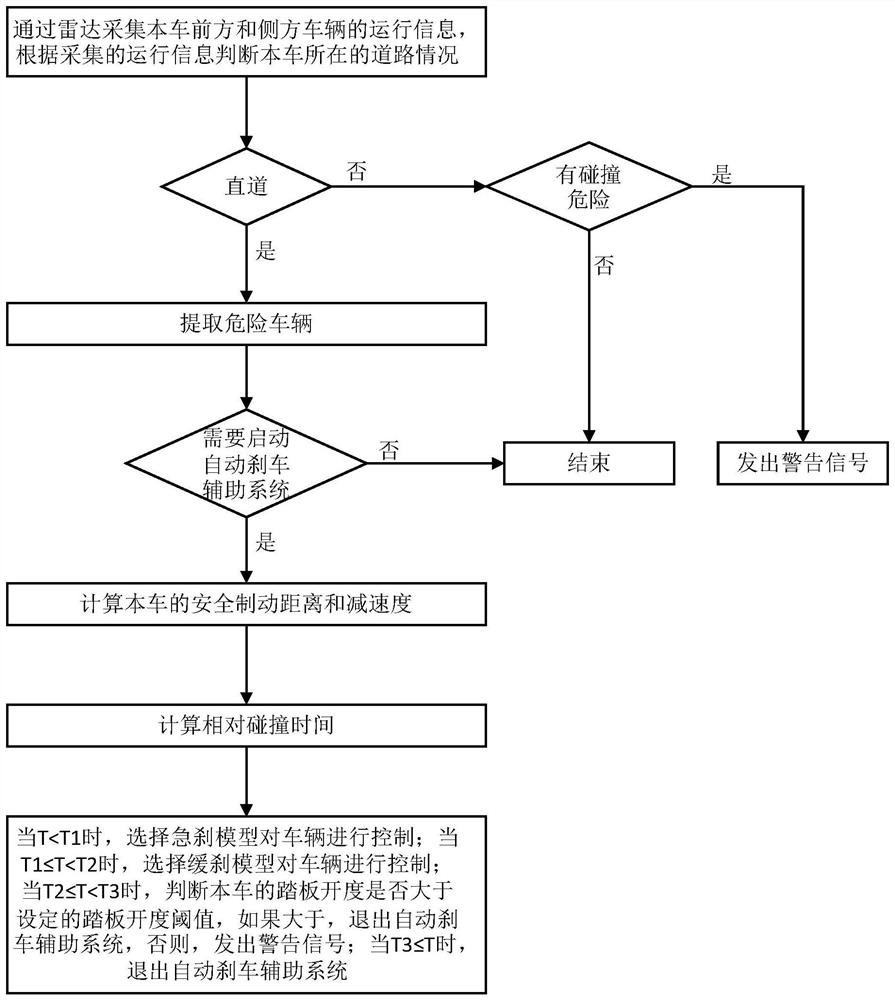
[0043] An embodiment of the present invention provides a method for controlling an automatic brake assist system, such as figure 1 As shown, it is a flow chart of the automatic braking assist system control method described in the embodiment of the present invention, and the method includes the following steps:
[0044] S1: Collect the running information of the vehicle in front and side of the vehicle through radar (in this embodiment, millimeter-wave radar is used as an example), and judge the road condition of the vehicle according to the collected running information. When the road is a straight road, Enter S3, otherwise, enter S2.
[0045] The running information includes but not limited to the relative position, relative angle, relative speed and relative deceleration of the vehicle and the own vehicle.
[0046] Described road situation can comprise multiple, and its judgment can adopt common method to judge, does not limit here, and non-straight road information is des...
Embodiment 2
[0115] The present invention also provides an automatic braking assist system control terminal device, which includes a memory, a processor, and a computer program stored in the memory and operable on the processor. When the processor executes the computer program, the Steps in the above method embodiment of Embodiment 1 of the present invention.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More