

Rapid connecting and replacing device and method for robot end effector
An end effector and robot technology, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of time-consuming, laborious and difficult end effectors, and achieve the effect of fast disassembly and assembly process, good reliability and large load.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
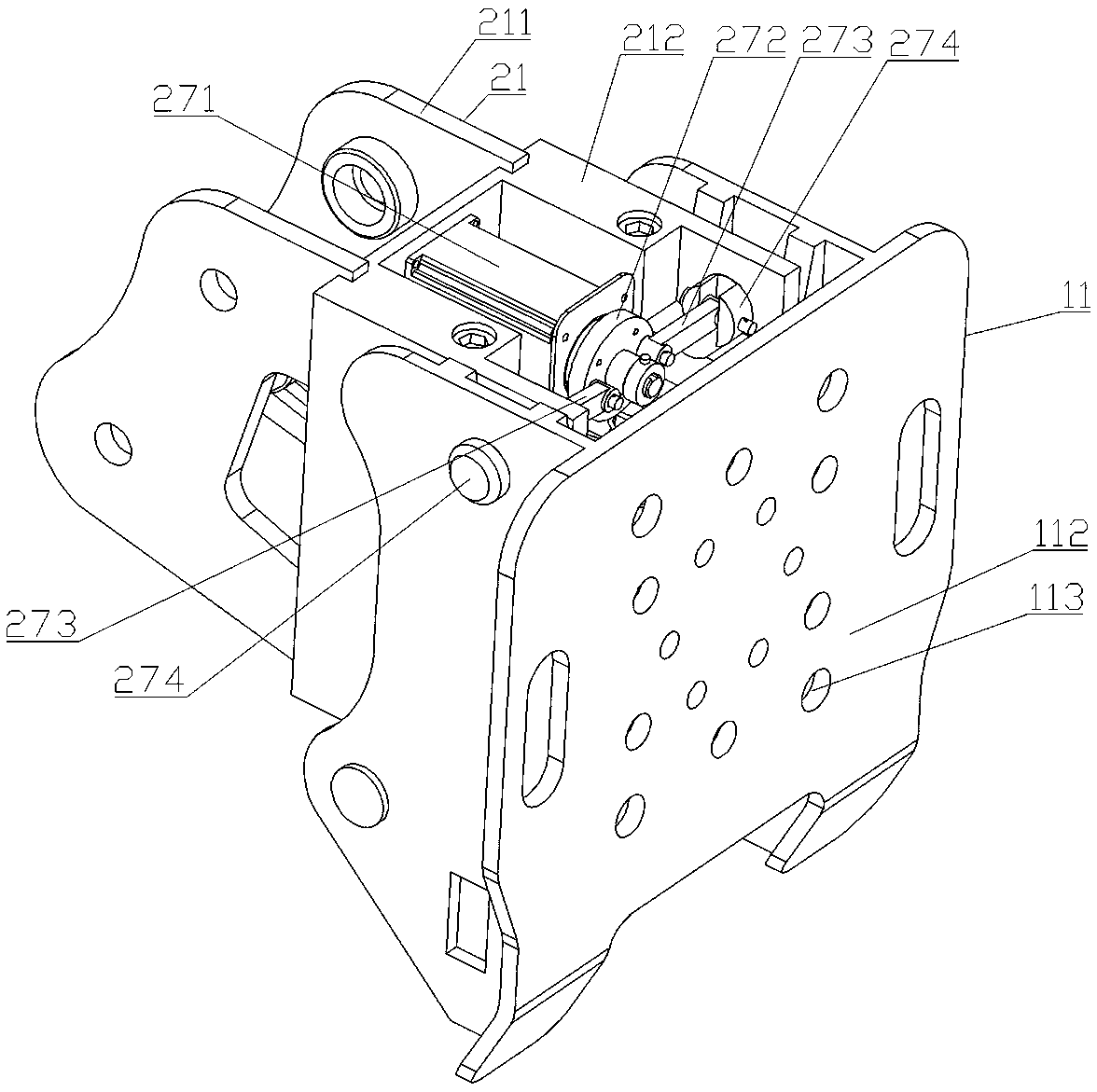
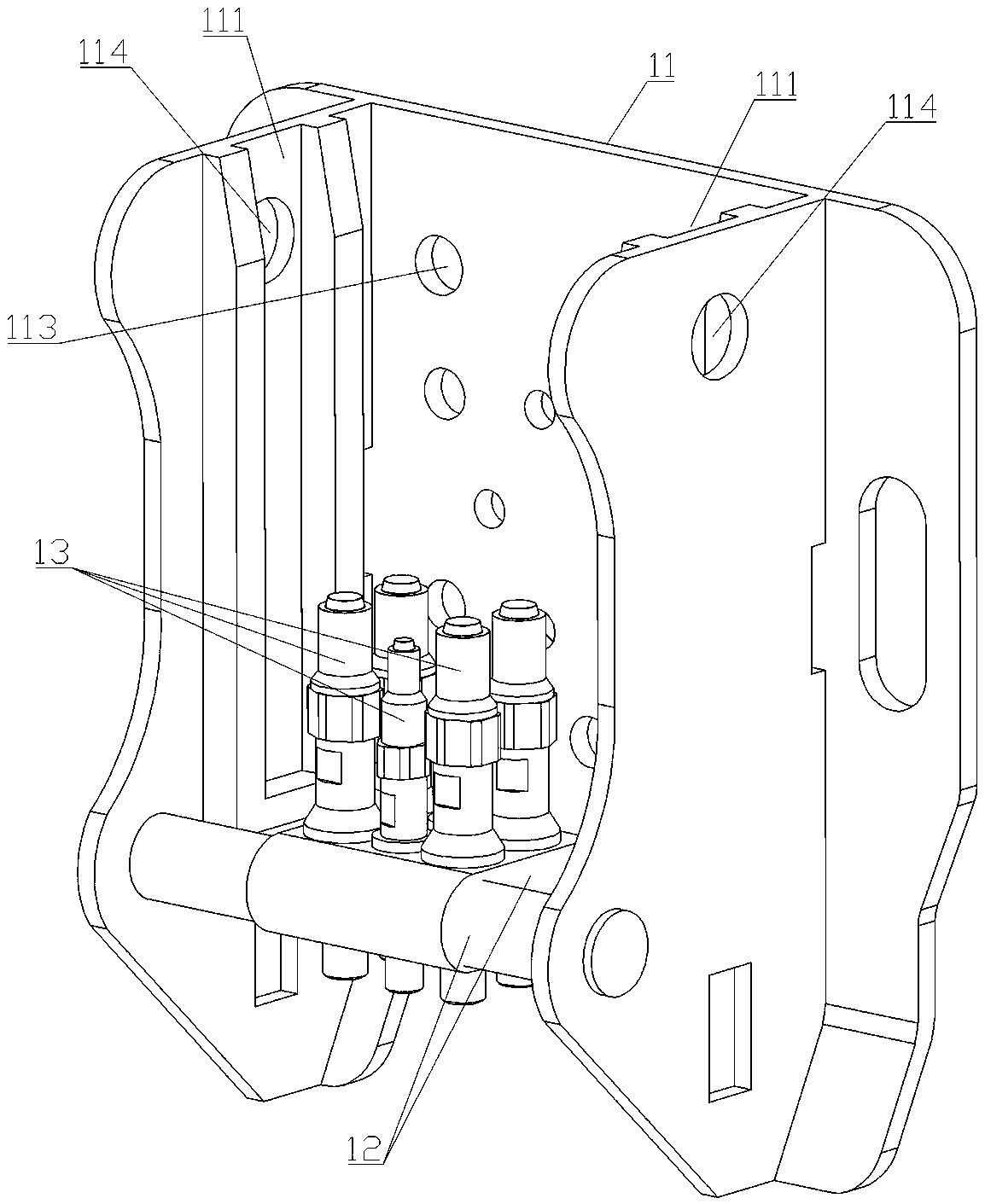
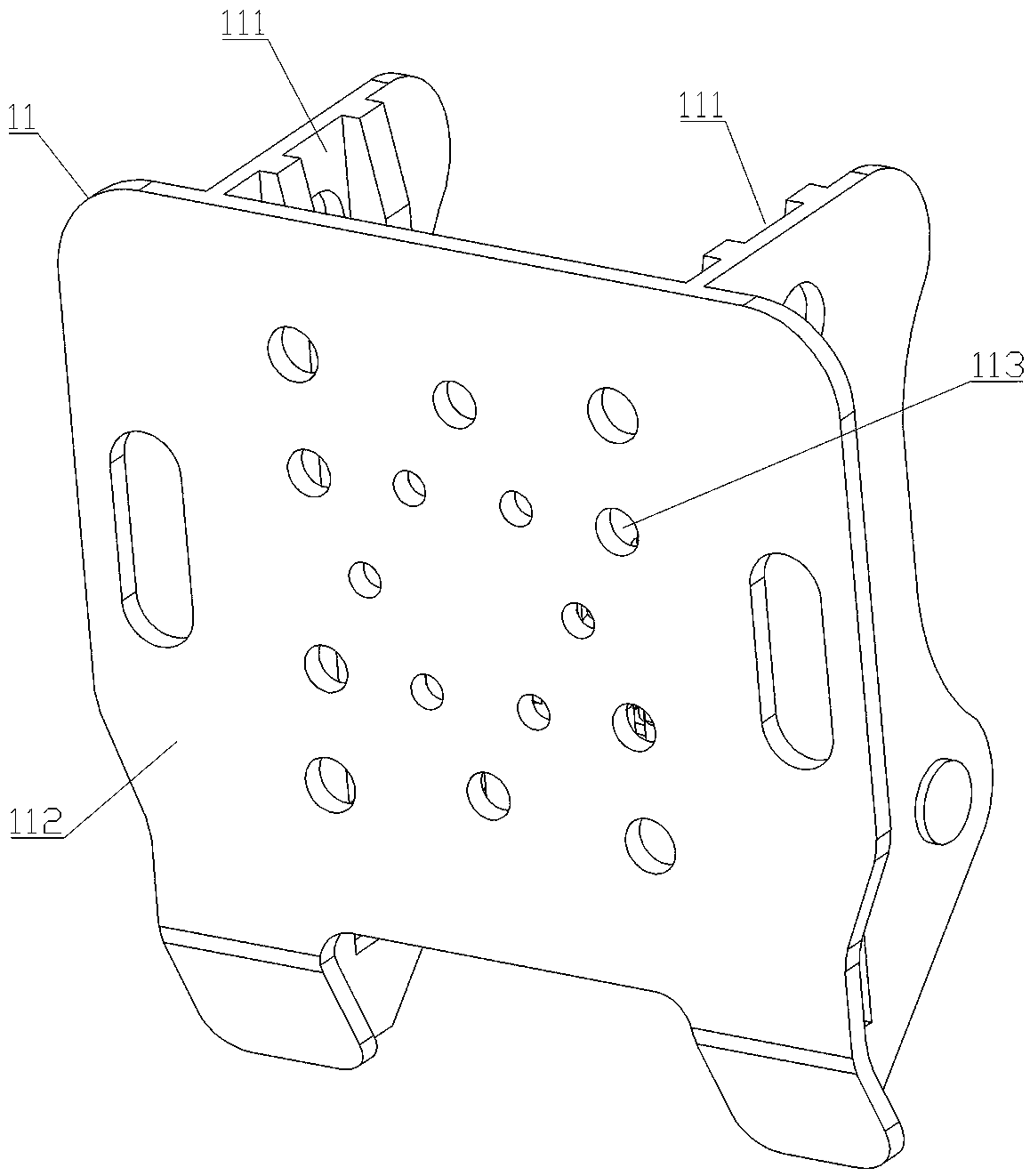
[0041] Such as Figure 1-7 As shown, the quick-change device for the end effector of the robot includes a first assembly and a second assembly.
[0042] The first assembly includes a tool tray 11 , a male connector seat 12 and a male connector 13 . The tool tray 11 is provided with an engaging portion A111 and a tool connecting surface 112 , and the tool connecting surface 112 is provided with a tool mounting hole 113 . A pin hole A114 is also provided on the tool tray 11 .
[0043] The male connector seat 12 is fixedly mounted on the tool tray 11 .
[0044] The male connector 13 is mounted on the male connector seat 12 .
[0045] The second assembly includes a connection seat 21 , a female joint 22 , a female joint seat 23 , a guide rod 24 , a spring 25 , a limiting block 26 and a locking assembly.
[0046] Two ends of the connecting seat 21 are respectively a robot docking end 211 and a tool tray docking end 212 , and the tool tray docking end 212 is provided with an eng...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More