

Arcing control device and method for robot welding
A robot welding and control device technology, applied in welding equipment, manufacturing tools, arc welding equipment, etc., can solve problems such as difficulty in starting arcs in robot welding, and achieve the effect of not being easy to stick wires, simple and convenient installation process, and simple actions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below with reference to the accompanying drawings.
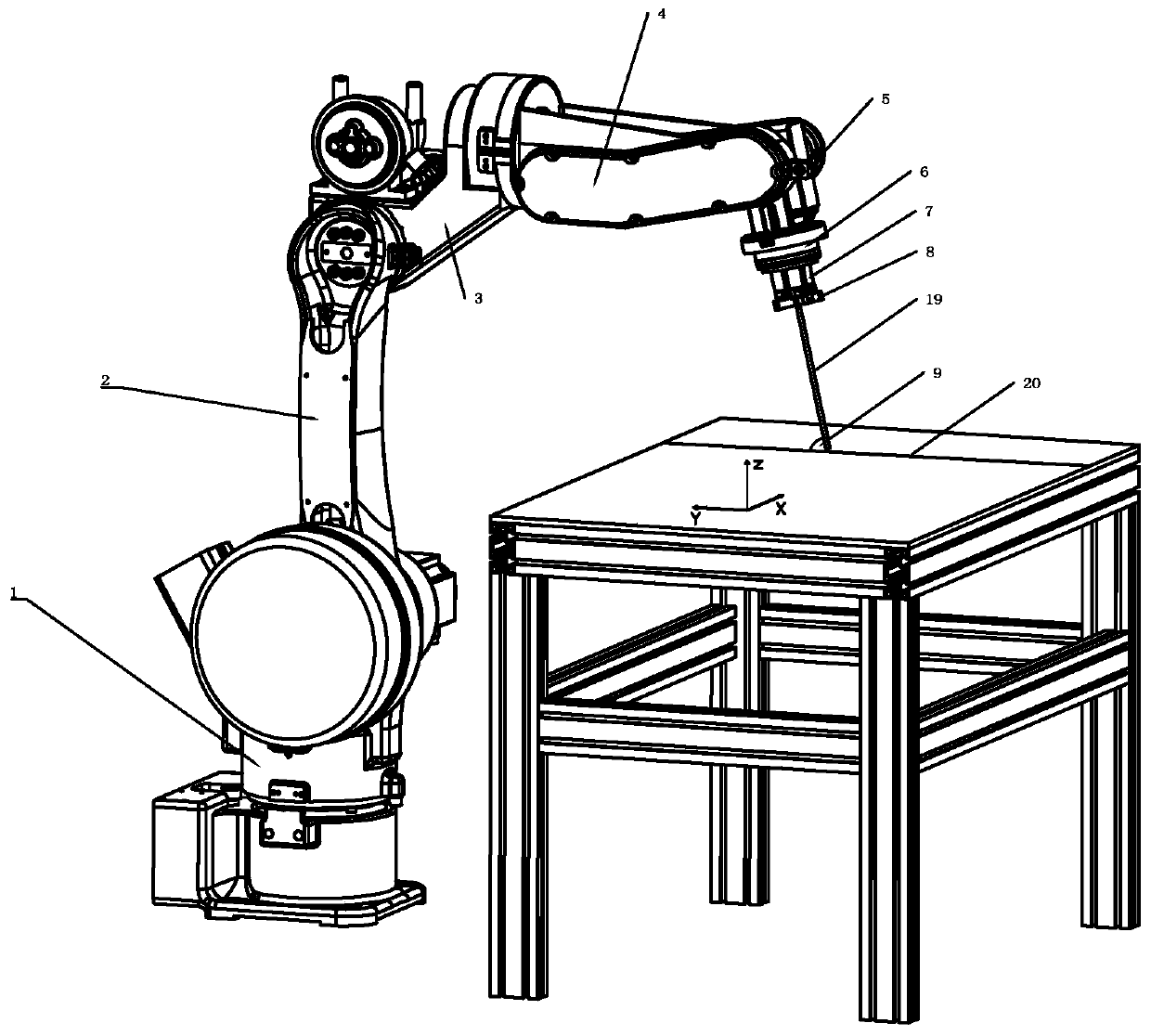
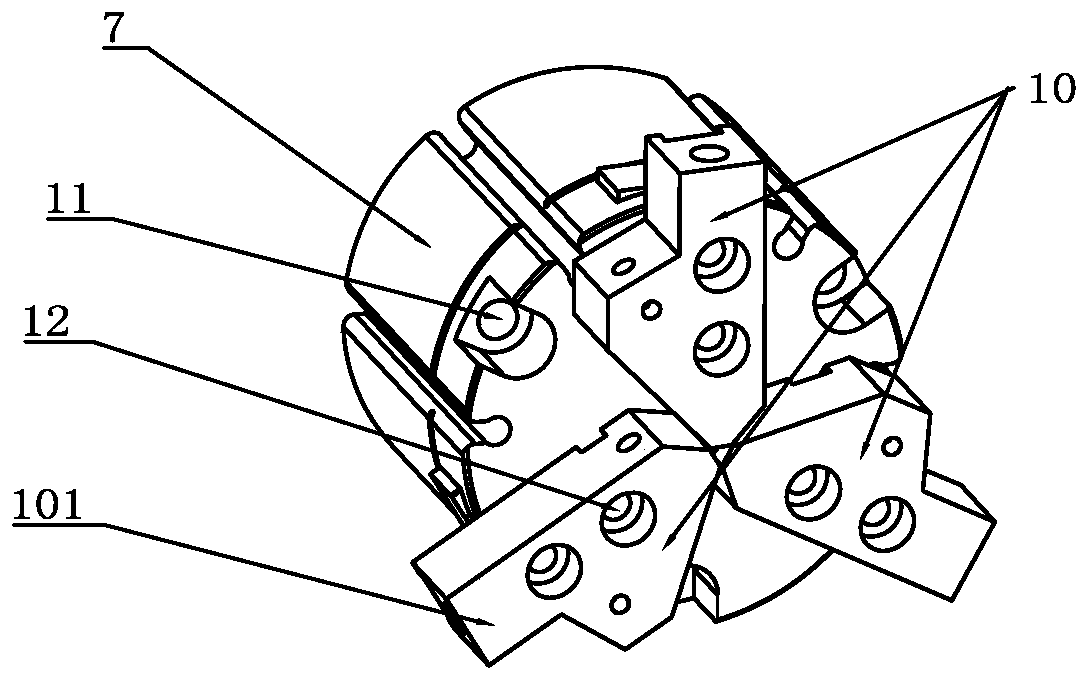
[0036] Such as figure 1 and figure 2 As shown, an arc starting control device for robot welding includes a robot execution unit, a cylinder (7) and a pneumatic unit (8) for clamping electrodes driven by the cylinder; wherein, the robot execution unit is used to perform welding actions , the clamping electrode pneumatic unit is used to provide a gripping force for clamping the electrode, and is a conductive contact point of the electrode, and the welding machine current is transmitted to the electrode through the electrode pneumatic unit; the electrode pneumatic unit passes through the first fixing hole (11) and screws are fixed to the cylinder; the cylinder and the robot execution unit are fixed through the second fixing hole (12) and screws.
[0037] Further, the pneumatic unit for clamping welding...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More