

Multi-region traversal path planning method for autonomous underwater vehicle
An underwater vehicle, a technology for traversing paths, used in instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] In order to have a clearer understanding of the above objects and advantages of the present invention, specific implementations of the present invention will be described in detail below in conjunction with the accompanying drawings.
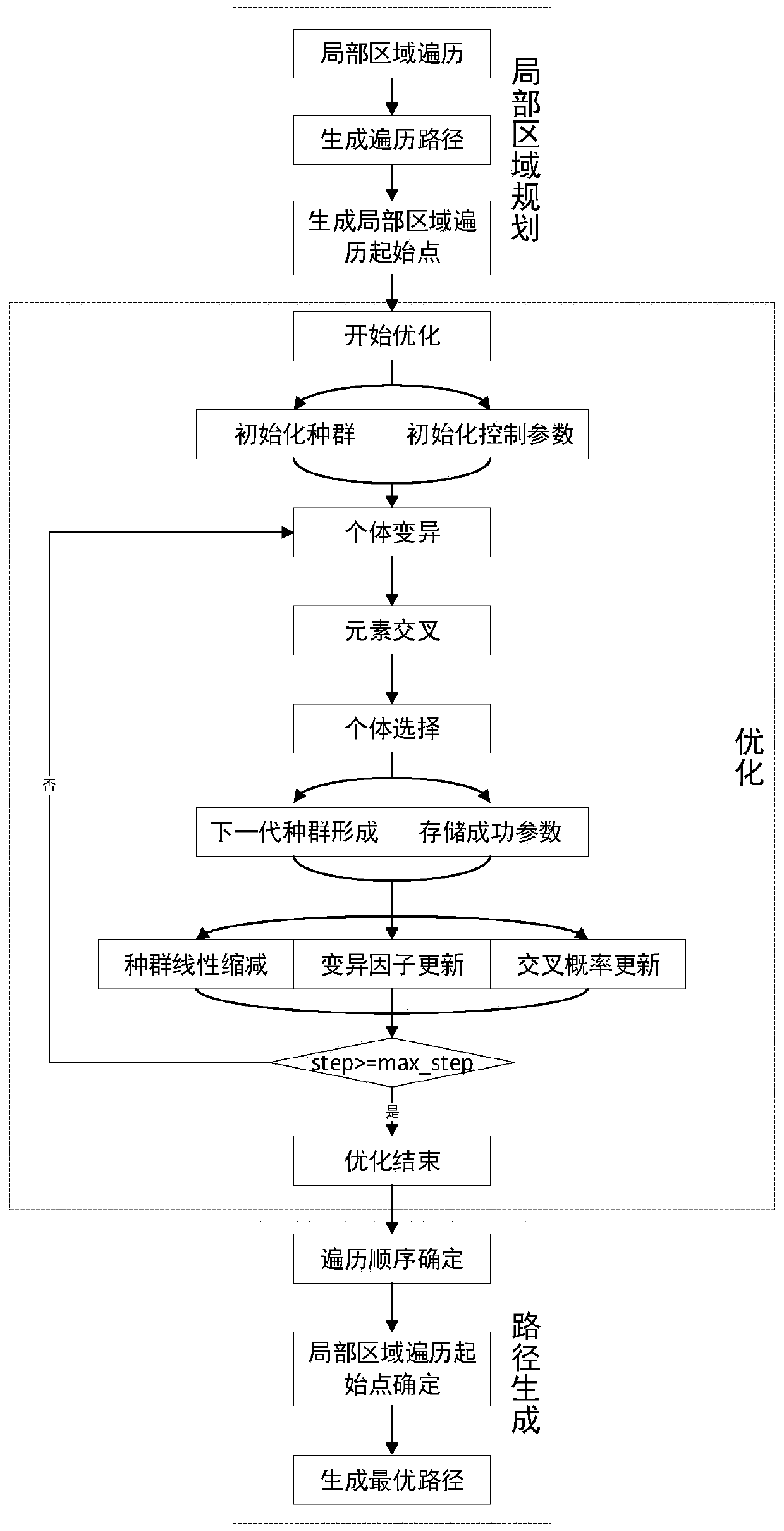
[0063] Such as figure 1 As shown, the autonomous underwater vehicle multi-area traversal path planning method proposed in this embodiment includes the following steps:
[0064] Step 1. Local area planning: generate local area paths based on the local area traversal method, and count all possible traversal starting points of each local area;
[0065] Step 2. Optimization: Based on the L-SHADE optimization method, analyze the optimal traversal sequence and the best traversal starting point for each local area;
[0066] Step 3. Path generation: Based on the obtained optimal traversal starting point position and optimal traversal order, combine the local traversal paths to generate an optimal traversal path.
[0067] 1. Local area planning:...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More