

Automatic spraying homocentric-squares-shaped path planning method and crop protection plane spraying operation method
A path planning, automatic spraying technology, applied in non-electric variable control, vehicle position/route/height control, instruments, etc., can solve the problem of spraying path deviating from farmland, reducing efficiency, reducing spraying efficiency, etc., to solve boundary duplication Spraying, short overall path length, effect of improving spraying efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
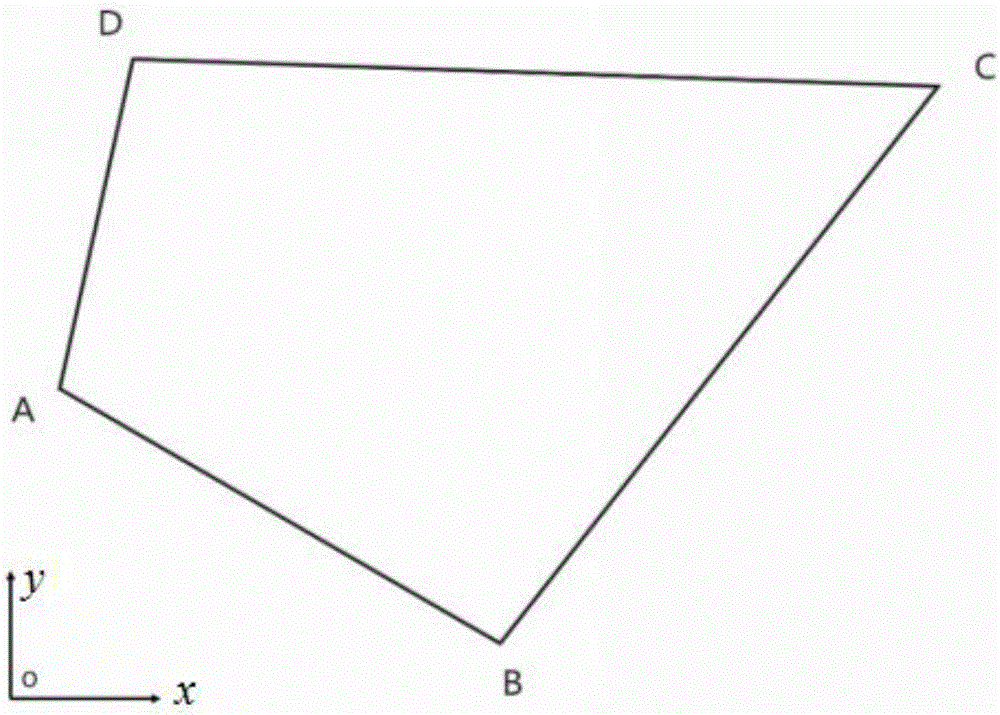
[0040] refer to Image 6 , this embodiment provides a method for automatically spraying zigzag path planning, so that the efficiency of drones spraying irregular quadrilateral farmland is high, and repeated spraying and missed spraying are avoided. It is especially suitable for the shortest side and the shortest side. Large quadrilateral farmland consisting of:
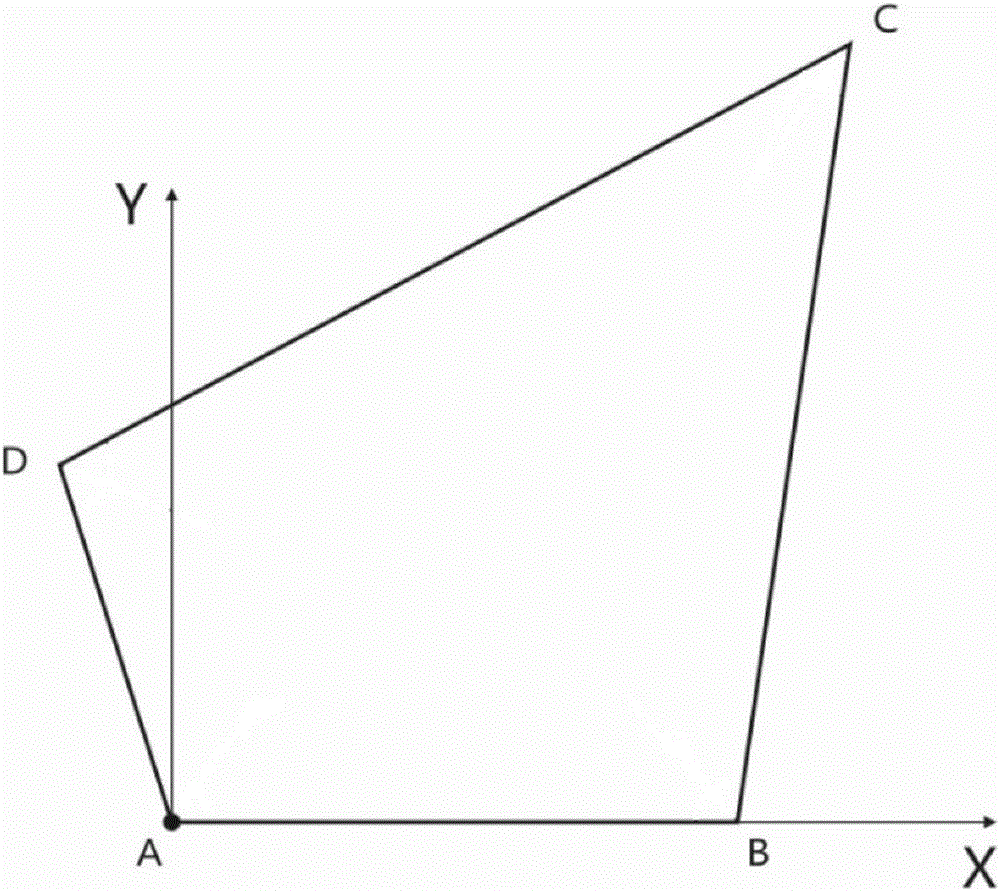
[0041] S101. The plant protection drone obtains the position coordinates of four vertices of the quadrilateral farmland to be operated one by one, and determines the operating height of the plant protection drone, and takes the four vertices as task points.
[0042] For details, please refer to figure 1 , first, the plant protection UAV is controlled by the pilot in manual mode to fly to the four vertices A, B, C, and D of the farmland to be operated in sequence, and controlled by the switch of the remote control, so that the flight control system obtains the command to collect coordinates, so that The GPS location ...
Embodiment 2
[0082] A plant protection machine spraying operation method of the present invention comprises the following steps:
[0083] S1. Perform path planning by using the method described in the first embodiment;
[0084] S2, the plant protection machine performs the spraying operation according to the path planned in S1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More