Dynamic pose estimation method and device
A pose estimation and dynamic technology, applied in the aerospace field, can solve the problems of poor real-time performance, long training time, and large amount of calculation, and achieve the effect of solving the problems of robustness and stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
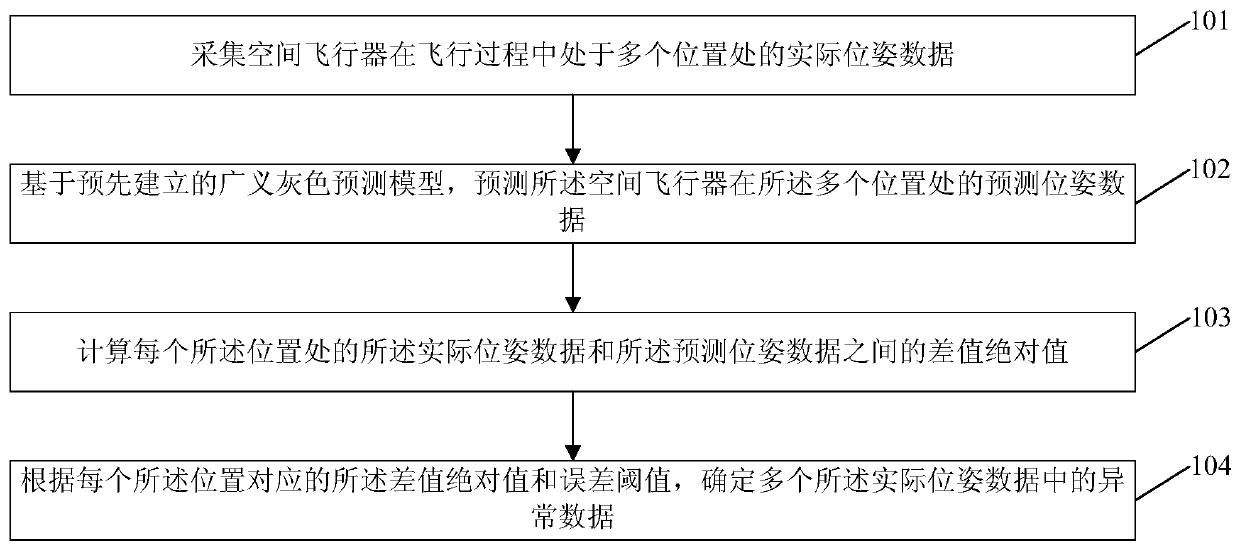
[0052] refer to figure 1 , shows a flowchart of steps of a dynamic pose estimation method provided by an embodiment of the present invention. Such as figure 1 As shown, the dynamic pose estimation method may include the following steps:
[0053] Step 101: Collect actual pose data of the spacecraft at multiple positions during flight.
[0054] The embodiments of the present invention may be applied in a scene of judging whether there is abnormal data in the pose data of the detected spacecraft during flight.
[0055] Spacecraft (Spacecraft) is a variety of aircraft that basically operate in accordance with the laws of celestial mechanics in the space outside the earth's atmosphere.
[0056] The space vehicle may be an artificial earth satellite, a space probe, a manned spacecraft, etc. Specifically, it may be determined according to actual conditions, which is not limited in the embodiments of the present invention.
[0057] The actual pose data refers to the specific posit...
Embodiment 2
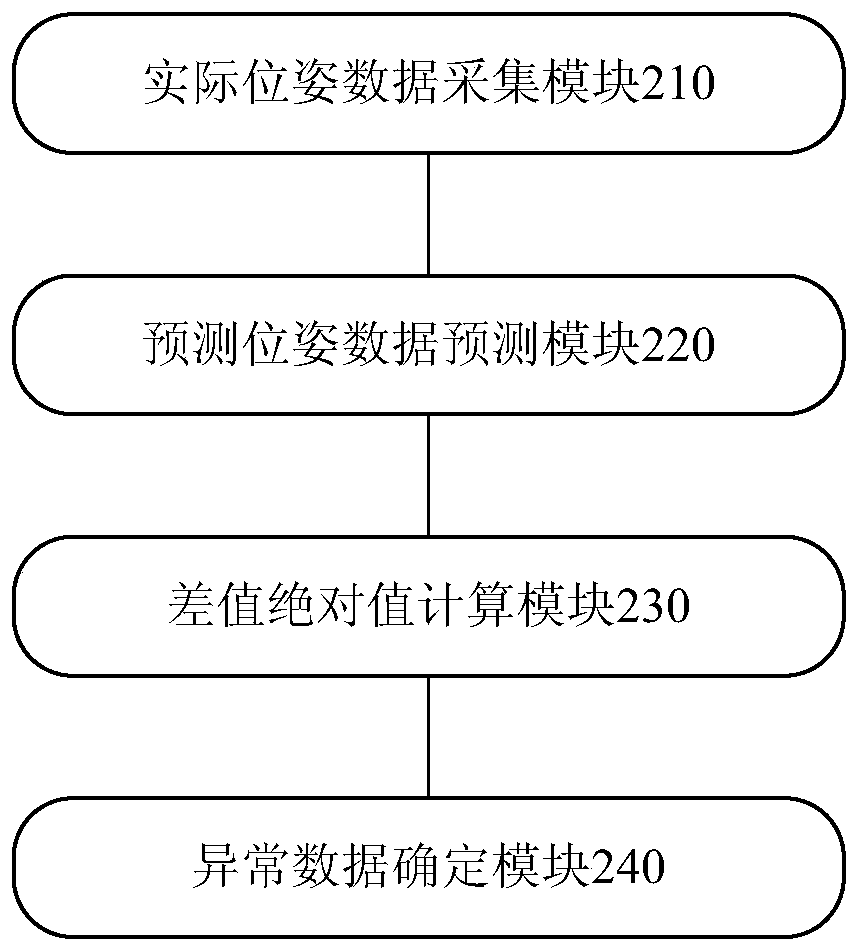
[0144] refer to figure 2 , shows a schematic structural diagram of a dynamic pose estimation device provided by an embodiment of the present invention. Such as figure 2 As shown, the dynamic pose estimation device may include the following modules:
[0145] The actual pose data acquisition module 210 is used to collect the actual pose data of the spacecraft at multiple positions during the flight;
[0146] The predicted pose data prediction module 220 is configured to predict the predicted pose data of the spacecraft at the plurality of positions based on a pre-established generalized gray prediction model;
[0147] A difference absolute value calculation module 230, configured to calculate the difference absolute value between the actual pose data and the predicted pose data at each of the positions;
[0148] The abnormal data determining module 240 is configured to determine abnormal data among the plurality of actual pose data according to the absolute value of the dif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



