

Robot path planning method and device based on ant colony algorithm
An ant colony algorithm and path planning technology, applied in two-dimensional position/channel control, instrument, vehicle position/route/height control, etc., can solve the problem of slow convergence speed, no further optimization of the path, and inconformity with the trajectory of mobile robots And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
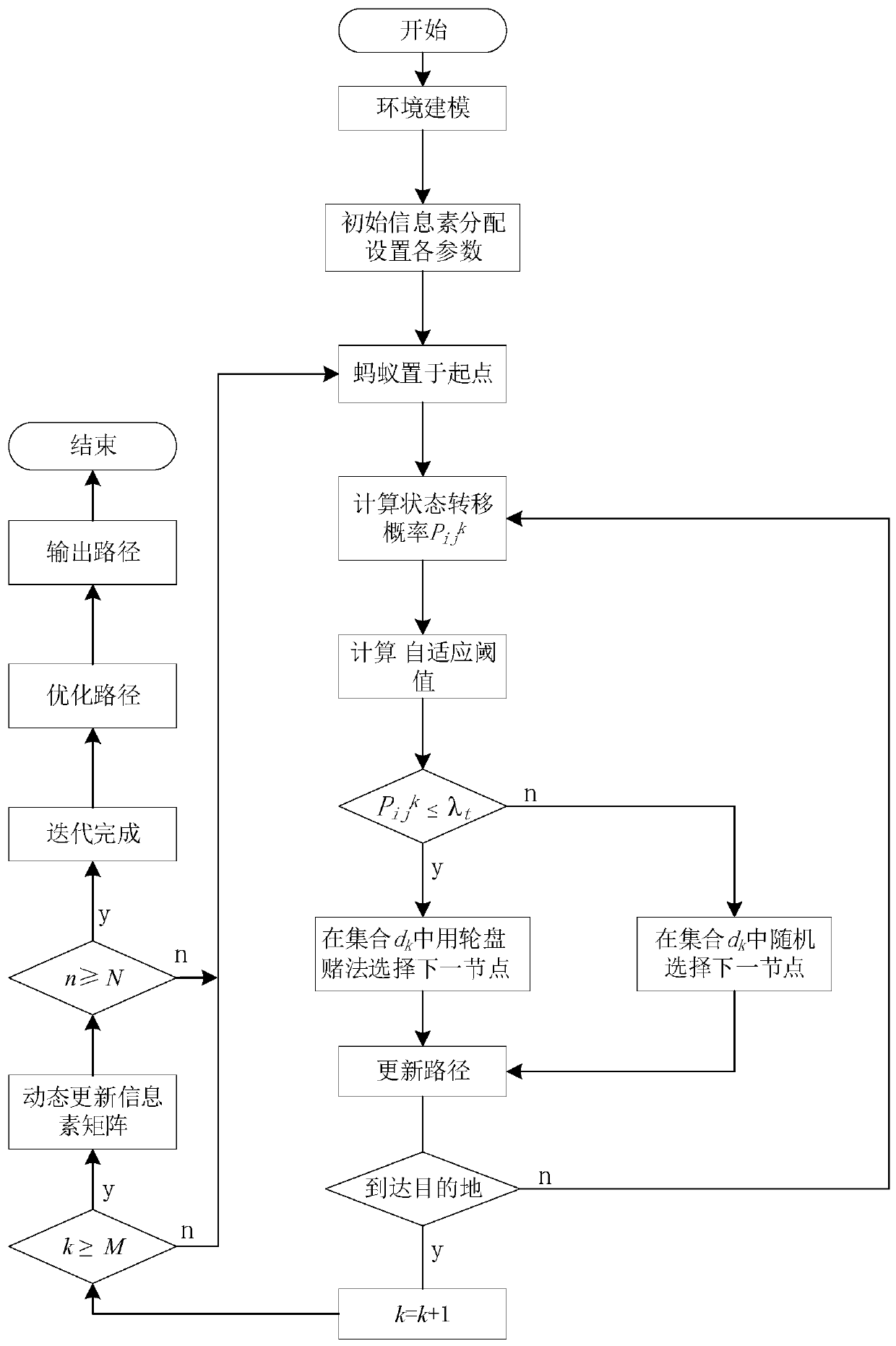
[0074] Such as figure 1 As shown, it is a flow chart of a robot path planning method based on ant colony algorithm provided by an embodiment of the present invention, figure 1 The non-italic n outside the judgment box means "no" and y means "yes". The non-italic n outside the judgment box does not have the same meaning as the n inside the judgment box or the n in the calculation formula below. A robot path planning method based on ant colony algorithm, said method comprising:
[0075] Step 1: Build a grid map and store environmental information; because the grid method has many advantages in building a map, it is especially suitable for the application of the ant colony algorithm. The present invention uses the grid method to build a global map and describes the environment information in the form of a matrix. Grid modeling converts the working environment of the robot into a digital map, and the environmental information of each point can be represented by index and status. ...
Embodiment 2
[0100] Corresponding to Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides a robot path planning device based on an ant colony algorithm, the device comprising:
[0101] A grid map building module, used to create a grid map and store environmental information;
[0102] The initialization module is used to input the initial pheromone, select the starting point and the end point, and set the algorithm parameters; wherein, the algorithm parameters include the total number of iterations N, the total number of ants in each generation M, the pheromone intensity coefficient Q, the pheromone volatilization coefficient ρ, the initial Information heuristic factor α and initial expectation heuristic factor β;
[0103] The state transition probability acquisition module is used to place the ant at the starting point and calculate the current state transition probability;
[0104] An adaptive threshold acquisition module, configured to acquire a cur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More