Surgery supporting apparatus, control method of the same, and storage medium
An auxiliary device and surgery technology, applied in the direction of surgery, program control, surgical manipulator, etc., can solve the problems of interfering with the operator or assistant, unable to ensure the action area of the robotic arm, and affecting the operation of the surgery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
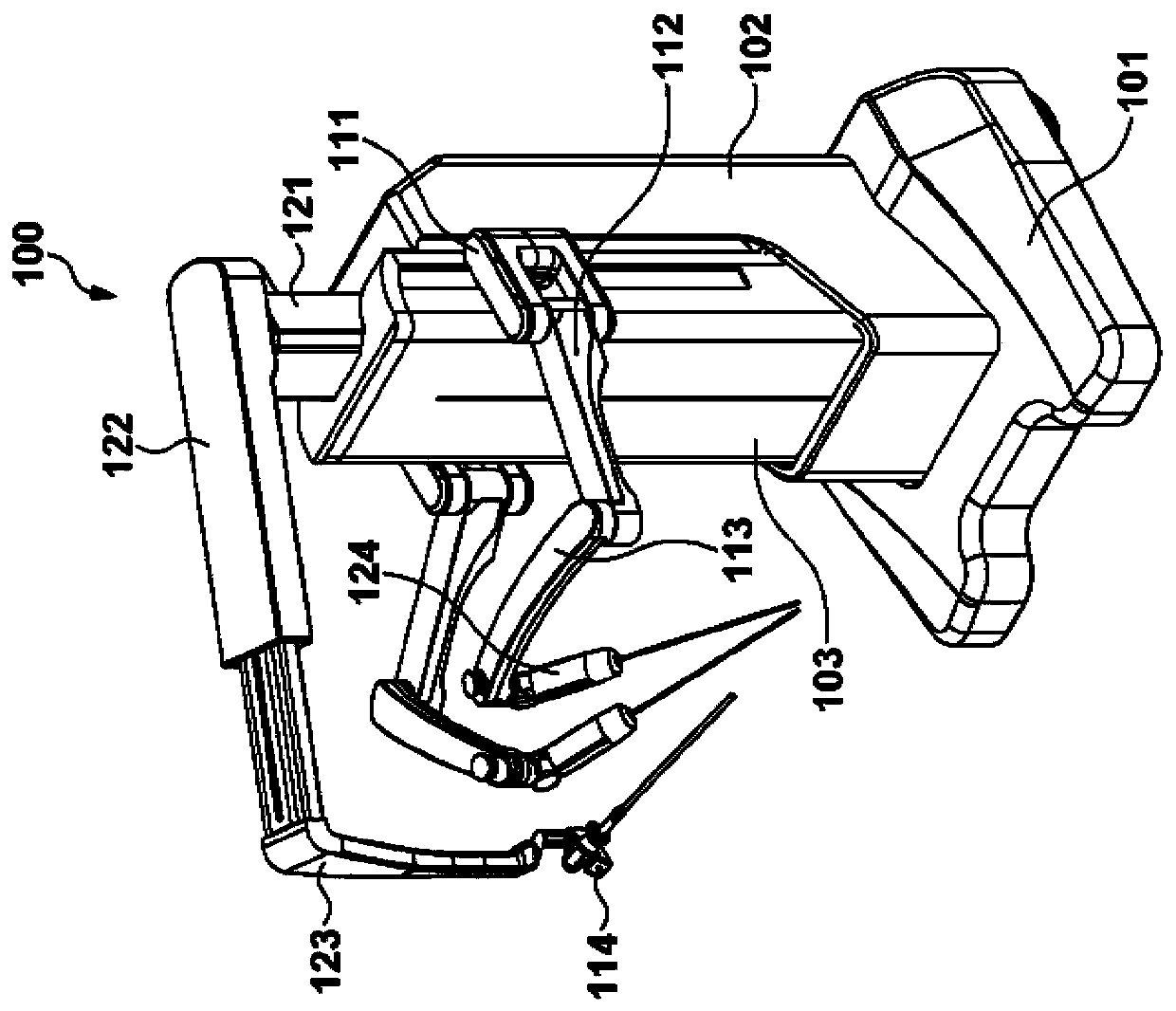
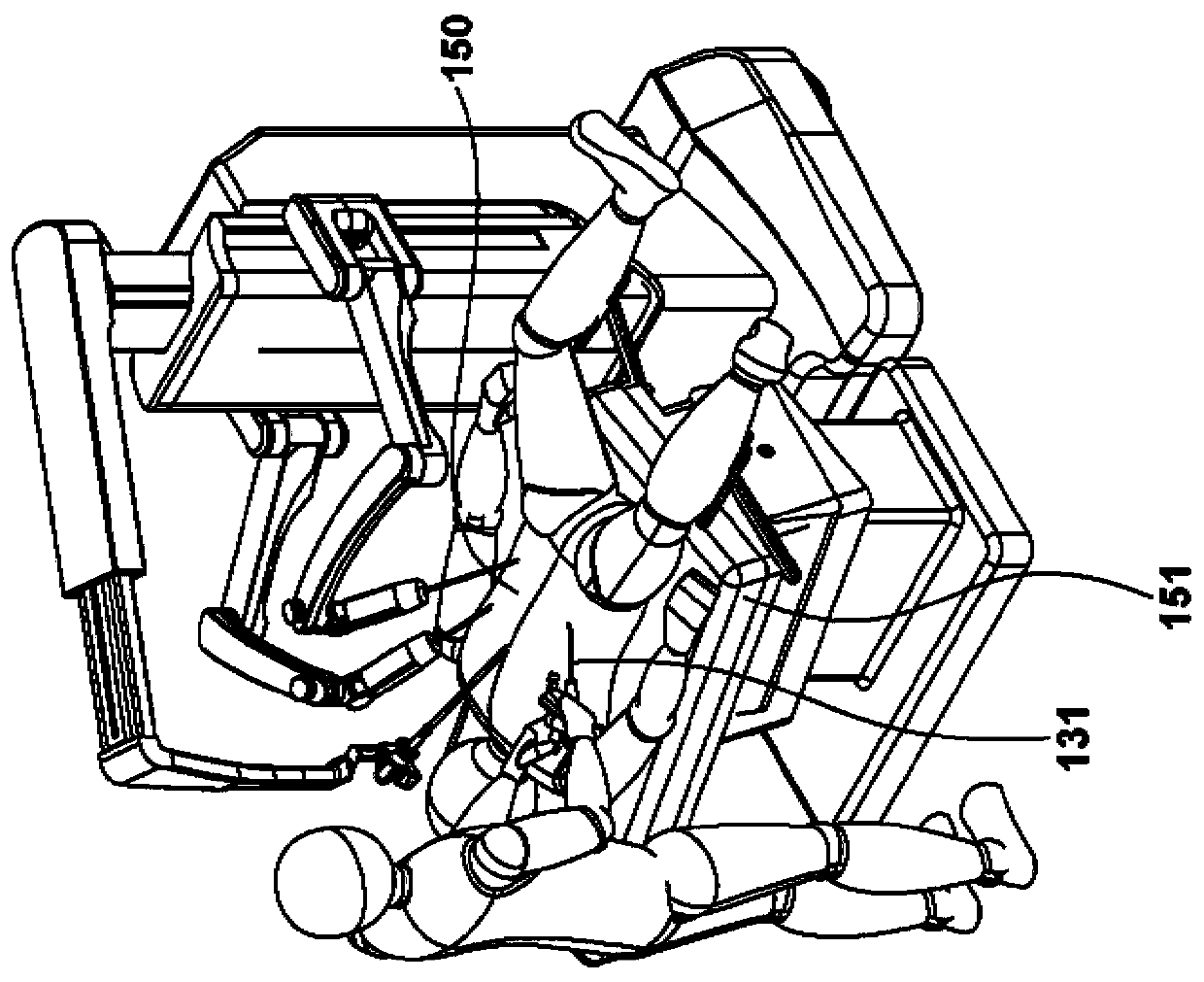
[0035] Hereinafter, exemplary embodiments of the present invention will be described in detail with reference to the drawings. The surgical assisting device of the present invention includes a surgical instrument inserted into a patient's body cavity via an overtube, and a robot arm that controls the posture of an end effector. The surgical assisting device measures an insertion angle and an insertion depth of a surgical instrument (hereinafter, also referred to as a hand-held medical instrument) actually used in surgery by inserting it into a body cavity by an operator. Furthermore, the robotic arm 100 is configured to control the attitude of surgical instruments and end effectors (hereinafter also collectively referred to as robotic medical instruments) based on the measurement results.
[0036] (Outline of Robotic Arm 100 of Surgical Assistance Device)
[0037] Figure 1A and Figure 1B The outline of the robot arm 100 related to the surgical assisting device of the prese...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More