

Continuous tracking method suitable for target grabbing of underwater robot
An underwater robot and target technology, applied in the field of visual target tracking, can solve the problems of tracking and grasping failure, and achieve the effect of reliable grasping and stable tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
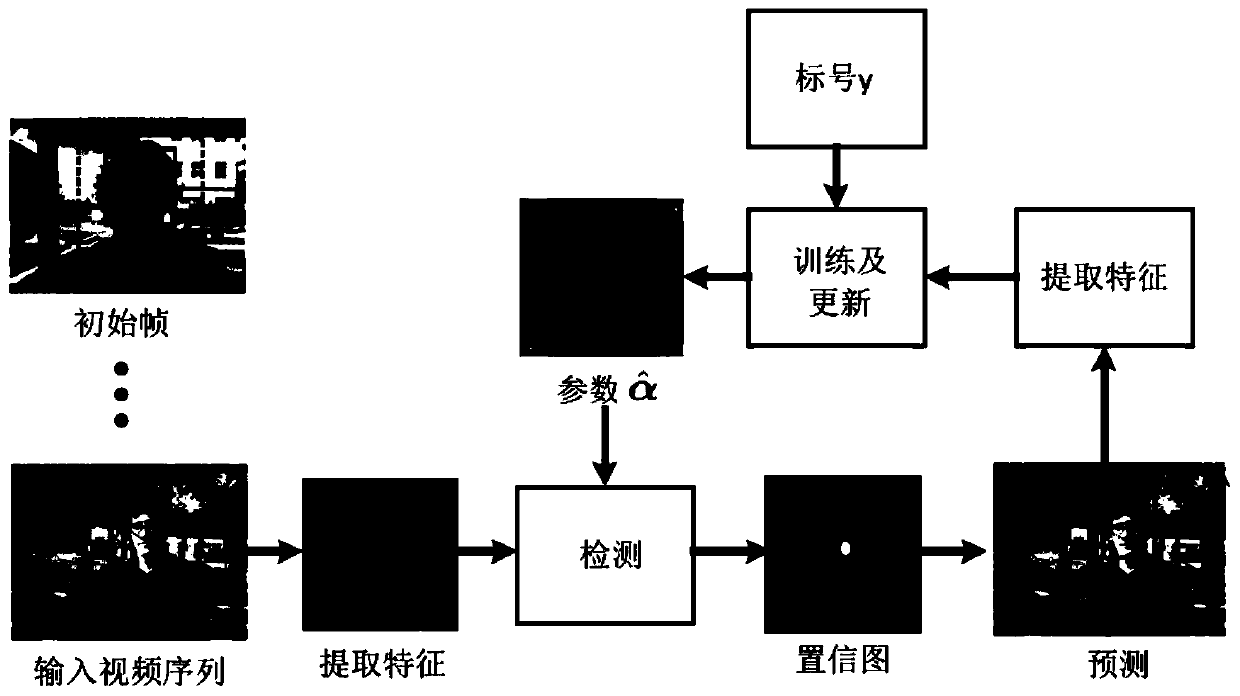
[0041] A continuous tracking method suitable for underwater robot target grasping, the main steps include: establishment of nuclear-related motion model, HOG feature extraction, appearance model establishment, model update and iteration. Among them, the establishment of the nuclear correlation motion model requires the KCF method based on correlation filtering to extract a richer training sample set by means of dense sampling. Dense sampling is achieved by cyclic shifting of base samples, generating a sample circulant matrix during sampling.
[0042] Dense sampling is to cyclically shift the region of interest through the characteristics of the circulant matrix to provide training samples for the filter. According to the kernel function theorem, the sample circulation matrix still maintains the circulation property after being mapped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More