

Adaptive vehicle state prediction system and prediction method based on model and parameter dynamic adjustment
A vehicle state and dynamic adjustment technology, applied in the direction of control devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
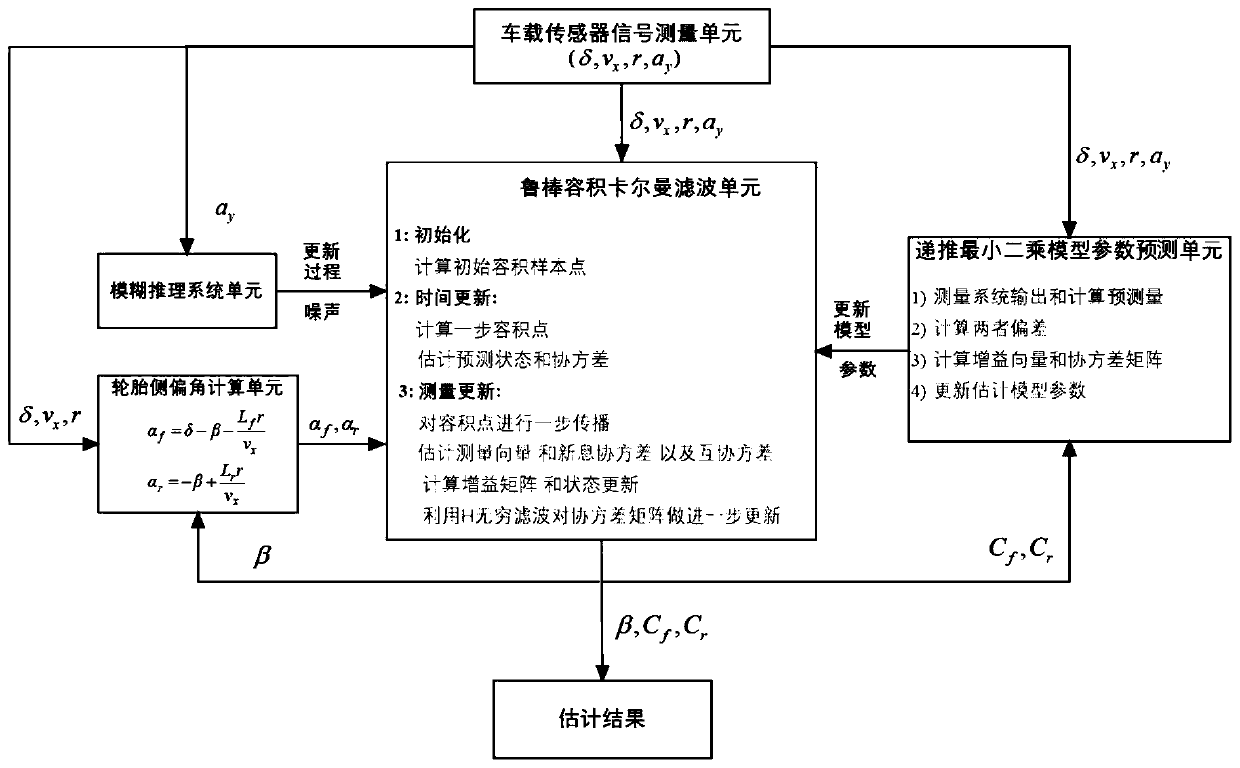
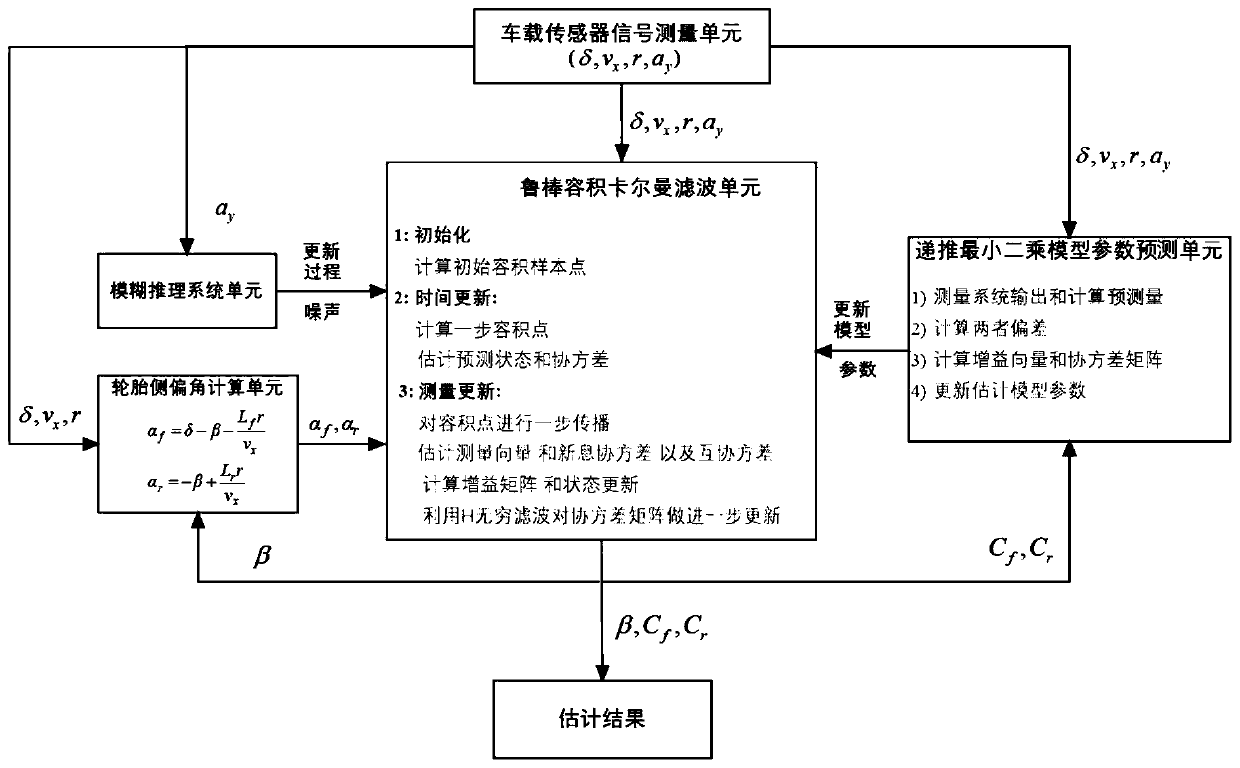
[0097] Such as figure 1 As shown, the whole system structure of the present invention mainly includes several units: vehicle sensor signal measurement unit, fuzzy reasoning system unit, tire slip angle calculation unit, model parameter prediction unit and robust volumetric Kalman filter unit, in this application, It is better than the prior art in that the fuzzy reasoning system unit set in the present application realizes the dynamic update of the process noise of the prediction algorithm, and the model parameter prediction unit realizes the update of the vehicle total mass parameter as a variable. Specifically, the on-vehicle sensor signal measurement unit is connected with the model parameter prediction unit, the tire slip angle calculation unit, the fuzzy reasoning system unit, and the robust volumetric Kalman filter unit, and the model parameter prediction unit, the tire side slip angle calculation unit, and the fuzzy reasoning unit are respectively connected. The system ...
Embodiment 2
[0104] Based on the system structure diagram of Embodiment 1, the on-board sensor signal measurement unit acquires various information of the car, performs dynamic update of process noise through the fuzzy reasoning system unit, and performs front wheel side slip angle and rear wheel side slip angle calculation through the tire slip angle calculation unit. For the calculation of declination, the model parameters are updated through the model parameter prediction unit, and finally the data is imported into the robust volumetric Kalman filter unit, and the data initialization, time update, and measurement update are performed through the robust volumetric Kalman filter unit. series of operations.
[0105] specific:
[0106] An adaptive vehicle state prediction method based on model and parameter dynamic adjustment, including the following steps:
[0107] Step 1: Obtain the longitudinal velocity, longitudinal acceleration, lateral acceleration, front wheel angle and yaw rate of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More