

Shelf alignment method based on latent handling robot
A handling robot and latent technology, applied in the field of robotics, can solve problems such as inability to perform alignment operations and narrow field of view, and achieve the effects of improved assembly flexibility, large alignment range, and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
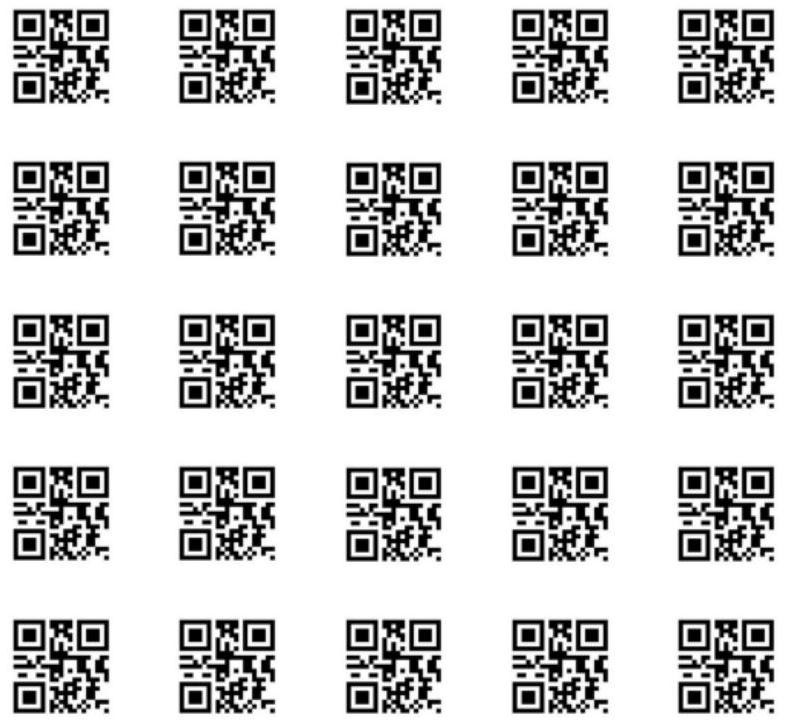
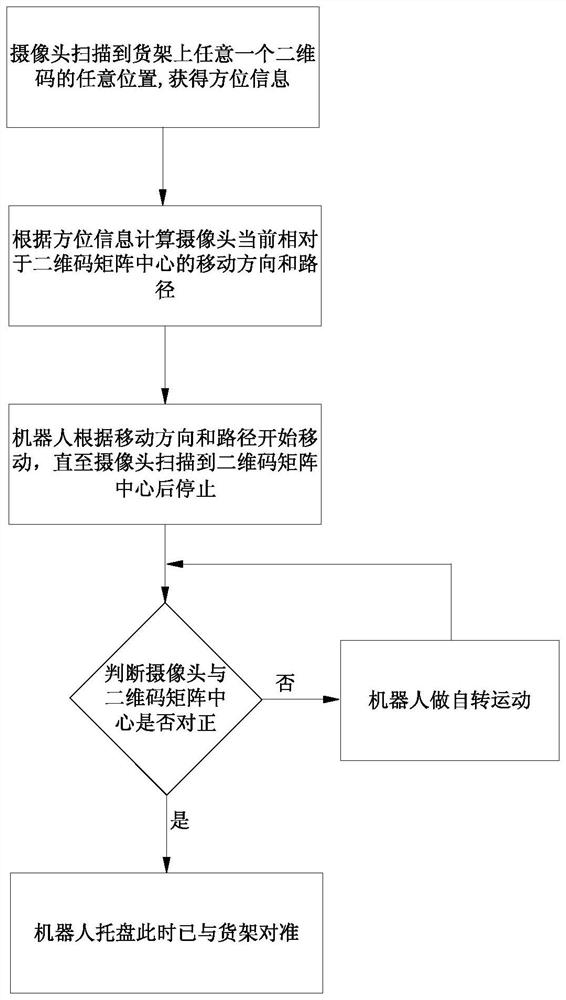
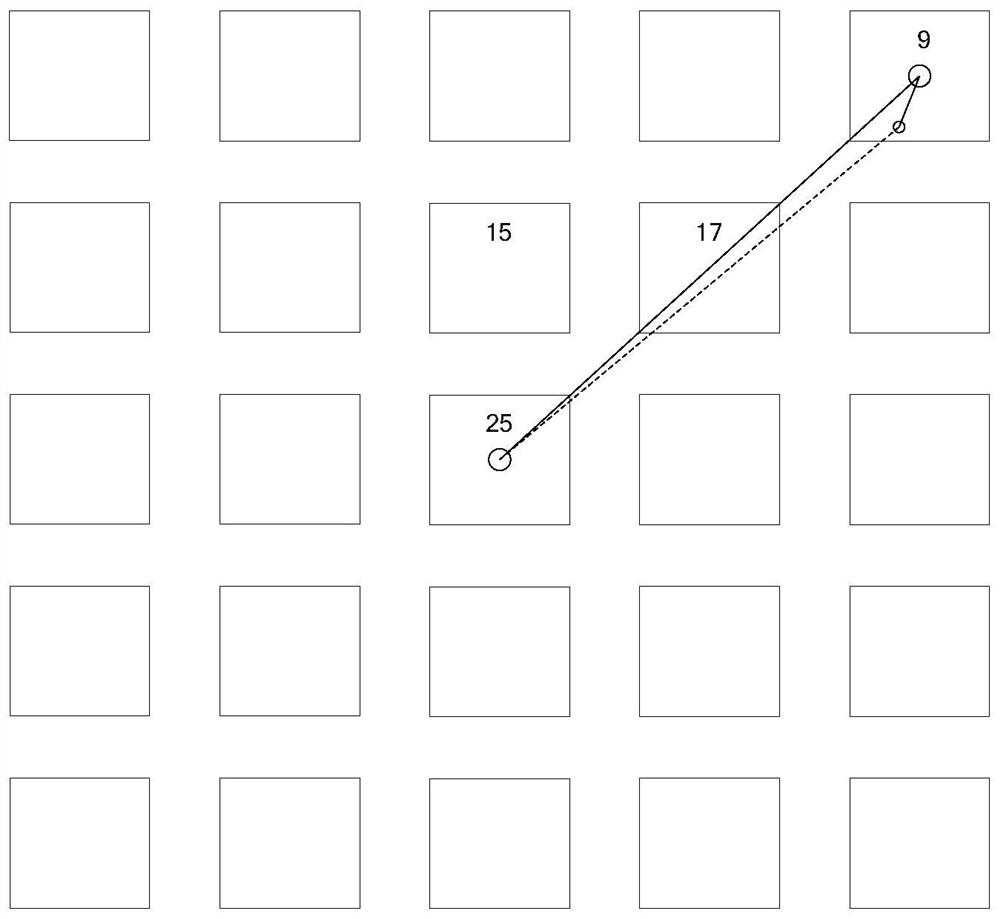
[0023] The present invention provides a solution that can realize the precise alignment between the handling robot and the shelf. First, a two-dimensional code matrix is set on the shelf for realizing the alignment with the robot tray. The size of the two-dimensional code matrix is a×b. a and b are both natural numbers, and both are greater than 1, such as 5×5, 6×6 or 7×7, such as figure 1 As shown, the interval between adjacent two-dimensional codes on the two-dimensional code matrix is the same. After setting the two-dimensional code matrix, the implementation process of the present invention is described below, as follows figure 2 shown, it includes the following steps:
[0024] (1) Turn on the camera on the robot, when the camera scans any position of any two-dimensional code on the shelf, obtain the orientation information of the two-dimensional code on the center of the two-dimensional code matrix and the current position of the camera relative to the center of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More