

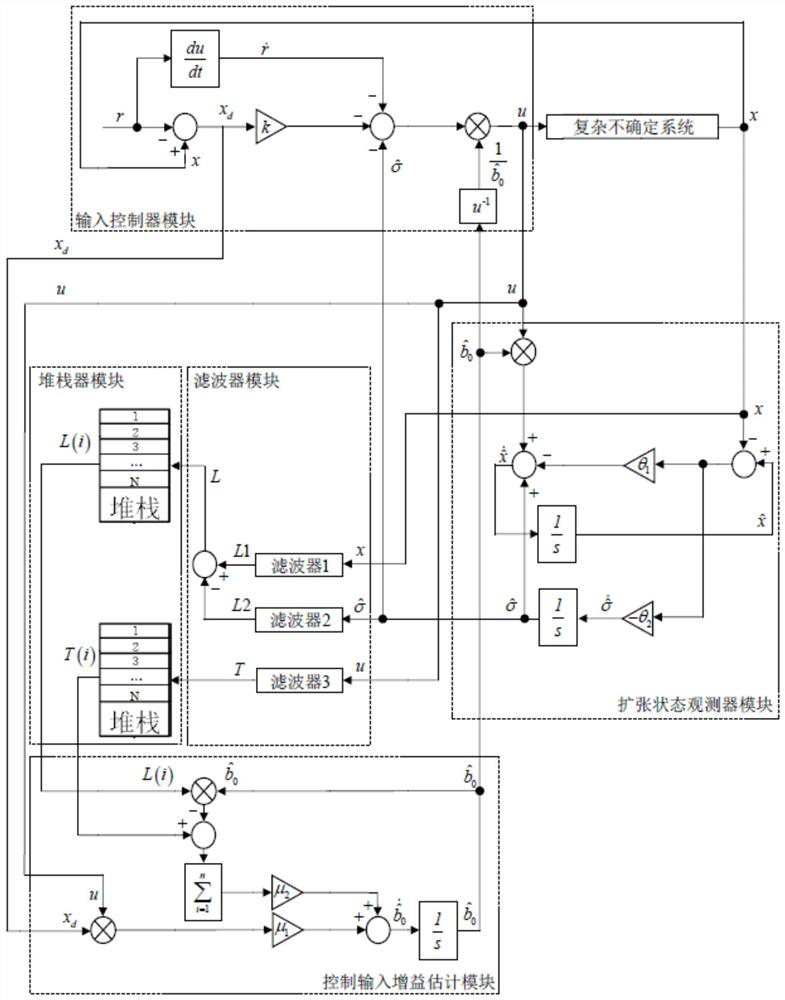
A data-driven anti-disturbance control structure for uncertain systems with unknown control gain
A control gain and data-driven technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as poor control gain input parameters and difficulty in obtaining convergence performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027]
[0032]
[0034] where is the derivative of the desired state of the complex uncertain system, k∈R
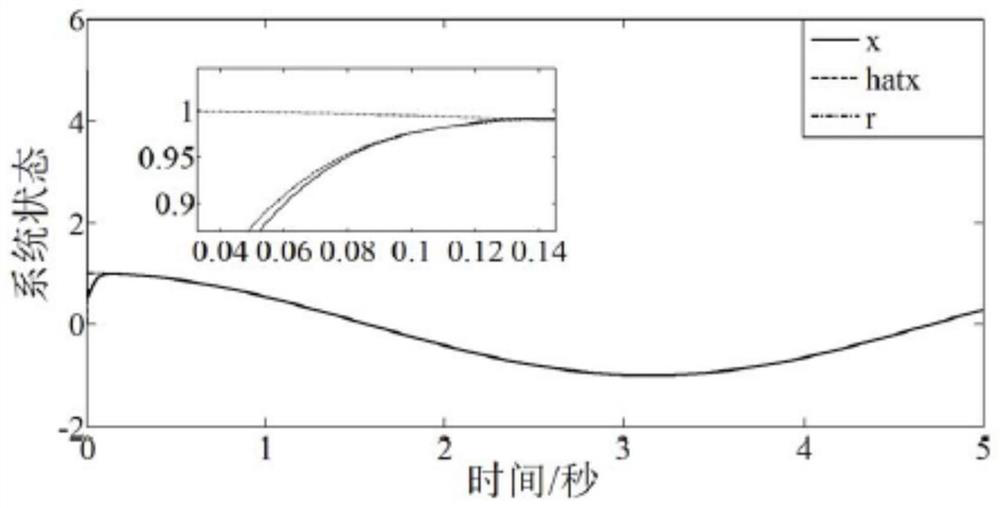
[0035] x
[0039]
[0044]
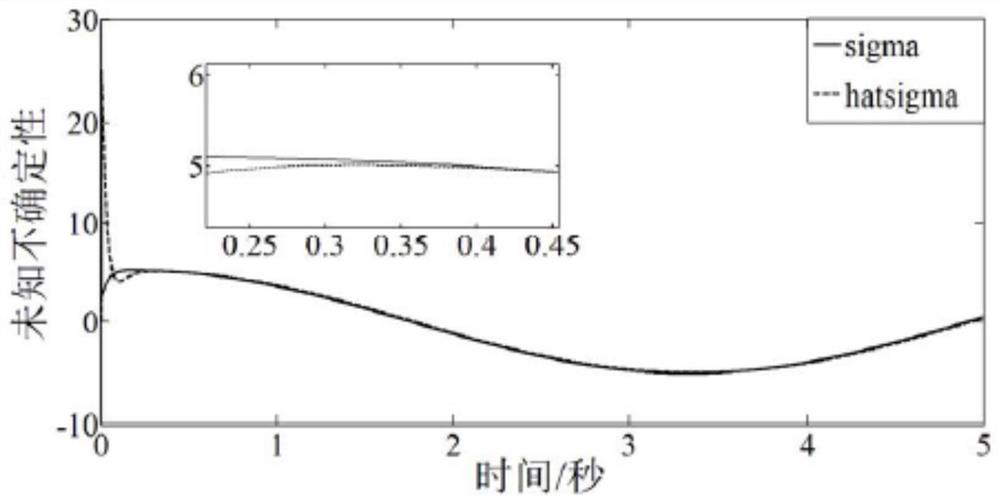
[0045] The unknown uncertainty is estimated by the filter 2 output filtering state derivative L2:
[0046]
[0048]
[0051] The filtering state derivative L and the filtering regression matrix T that the filter module outputs are connected with the input end of the stacker module.
[0053] The input end of the stacker module is connected with the filtered state derivative L and the filtered regression matrix T. stack memory design
[0054]
[0059]
[0062] The technical scheme of the present invention is further described below by specific application examples.
[0065]
[0067]
[0068] wherein for the control input reference parameter: k=-50;
[0069] The expanded state observer is designed as:
[0070]
[0071] wherein the parameters introduced for estimating the unknown uncertainty: θ
[0073]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More