

Deep space probe angle measurement and time delay integrated navigation method based on on-line estimation
A deep space probe and integrated navigation technology, which is applied to integrated navigators, navigation through velocity/acceleration measurement, astronomical navigation, etc. Time delay measurement deviation and other problems, to achieve the effect of suppressing influence, improving navigation accuracy, and high estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
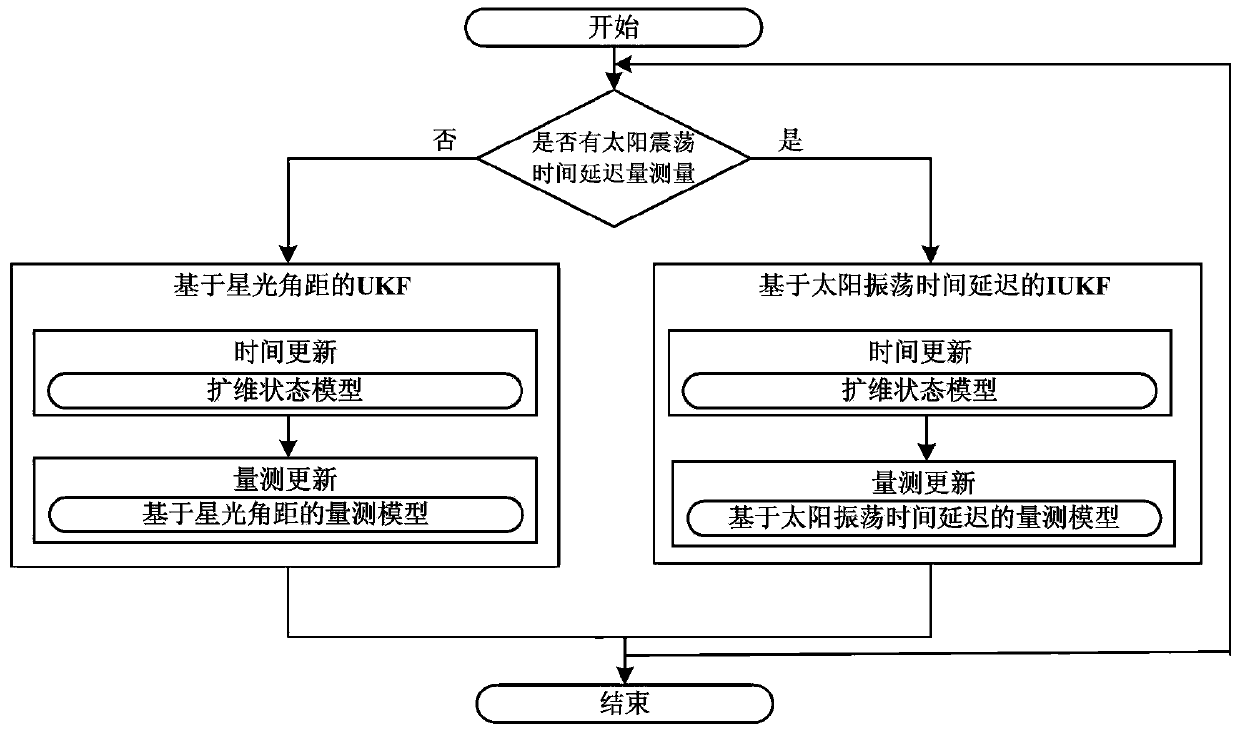
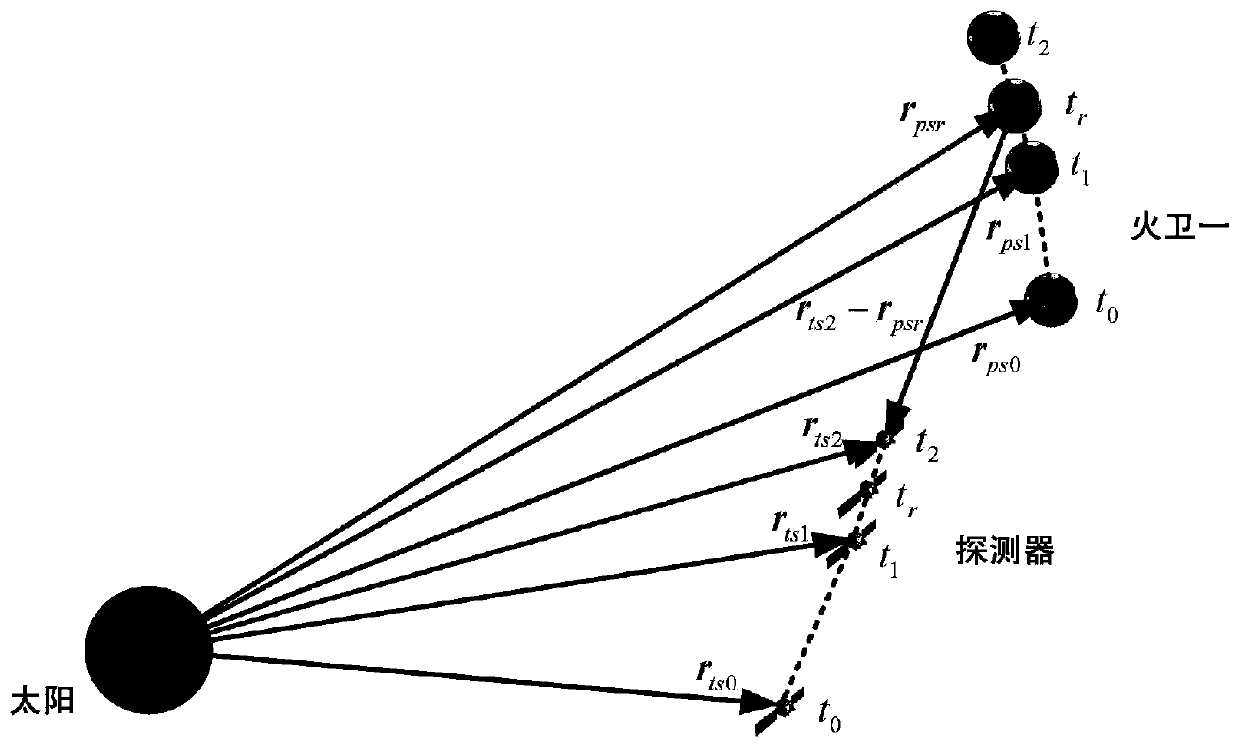
[0059] see figure 1 and figure 2 , an angle measurement and delay integrated navigation method for deep space probes based on online estimation, with Mars as the target planet of the probe and Phobos as the reflective celestial body. Firstly, estimate the current position and velocity information of the detector and the reflecting celestial body, and establish a system state model as the system state quantity according to the orbital dynamics; use the angle measuring sensor to obtain the starlight between the detector, the reflecting celestial body and the background stars Measure the angular distance, and establish a starlight angular distance measurement model; use two atomic frequency discriminators to observe the direct sunlight and the reflected sunlight reflected by the reflecting celestial body, and compare the measurement of the solar oscillation time delay, and establish the time delay The measurement model; through the unscented Kalman filter, the position and velo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More