

Method for compensating inertia/GPS integrated navigation external lever arm effect errors under rotor wing disturbance
A technology of lever-arm effect and combined navigation, which is applied to navigation, navigation, mapping and navigation through velocity/acceleration measurement, and can solve the problems of outer lever-arm effect error and the position of the center of mass of the aircraft in the form of non-superimposition. The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Embodiments of the invention are described in detail below, examples of which are illustrated in the accompanying drawings. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0051] The specific implementation is as follows:
[0052] 1. According to the error principle of the external lever arm effect, the error model of the external lever arm effect is established.
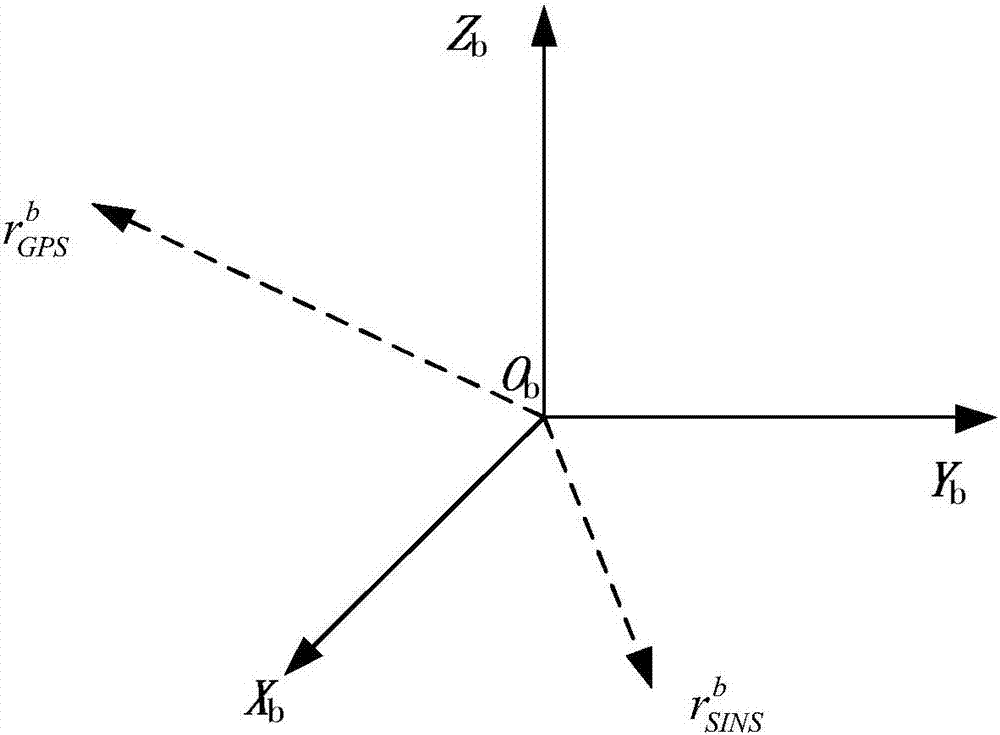
[0053] like figure 1 As shown, in the body coordinate system, is the GPS antenna position, is the SINS position, and the difference between the GPS antenna and the SINS position is defined as the distance r b :
[0054]
[0055] In formula (1), r b =[r x r y r z ] T , r x is the projection of the distance of the outer lever arm in the direction of the X-axis in the body coordinate system, r y is the projection of the distance of the outer lever arm in the dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More