

Robot calibration method, robot calibration system and readable storage medium
A calibration method and a calibration system technology are applied in the field of robot calibration method, robot calibration system and readable storage medium, which can solve the problems of excessive data volume of the processor, complicated operation, high price, etc., so as to improve the trajectory accuracy and improve the usage. Accuracy, cost-effective solutions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
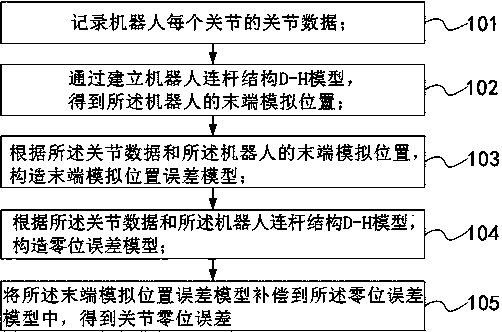
[0059] The embodiment of the present application provides a robot calibration method, which can quickly realize the calibration of the robot joint zero position and the tool coordinate (the first measurement point), obtain the error between the actual robot joint zero position and the theoretical joint zero position, and then Error compensation into the controller will easily improve the trajectory accuracy of the robot, thereby imp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More