

A kind of robot trajectory synchronization control method, computer readable storage medium
A synchronous control and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as poor synchronization of joints, approximately the same command response, and inability to guarantee robot trajectory accuracy, so as to ensure synchronization and improve trajectory accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
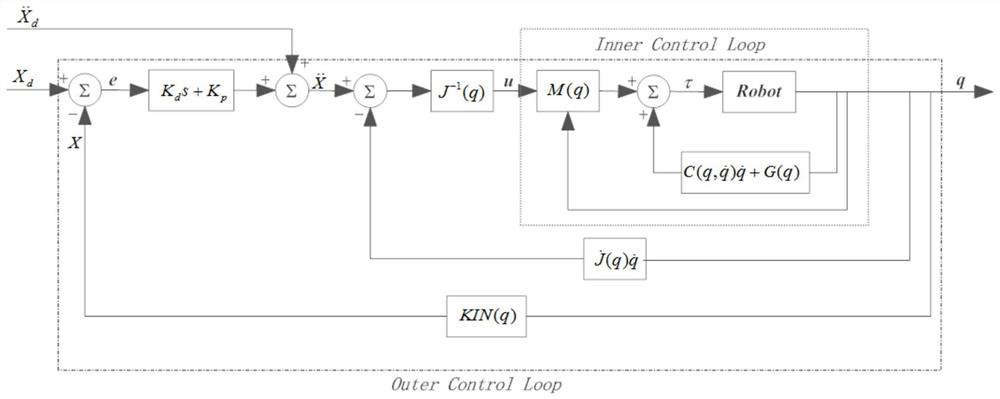
[0074] A robot trajectory synchronization control method, in this embodiment, is specifically composed of an inner control loop and an outer control loop, and specifically, includes the following steps:
[0075] Step 1. Use the second-order system of the mass-spring damping model to perform closed-loop control on the position and attitude of the robot end, and obtain the linear acceleration in Cartesian space and angular acceleration
[0076] Specifically include:
[0077] Step 1.1: As figure 1 As shown, according to the feedback angle q of each joint of the robot, the positive motion formula KIN(q) of the robot is used to calculate the feedback pose X of the end of the robot. The method is as follows:
[0078] The kinematic model of the robot is established by the standard D-H method, and the D-H parameters of the robot are obtained: d, a, α. According to the coordinate transformation method, the homogeneous transformation matrix of the robot end coordinate system {n} i...
Embodiment 2
[0125] This embodiment discloses a computer device, which may be a server, and the computer device includes a processor, a memory, a network interface, and a database connected through a system bus. Among them, the processor of the computer device is used to provide computing and control capabilities. The memory of the computer device includes a non-volatile storage medium, an internal memory. The nonvolatile storage medium stores an operating system, a computer program, and a database. The internal memory provides an environment for the execution of the operating system and computer programs in the non-volatile storage medium. The database of the computer device is used to store the data involved in the robot trajectory synchronization control method. The network interface of the computer device is used to communicate with an external terminal through a network connection. When the computer program is executed by the processor, the robot trajectory synchronization control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More