Method and device for determining pose of sensor in robot
A determination method and a determination device technology, applied in the field of robotics, can solve the problems of low sensor pose accuracy and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
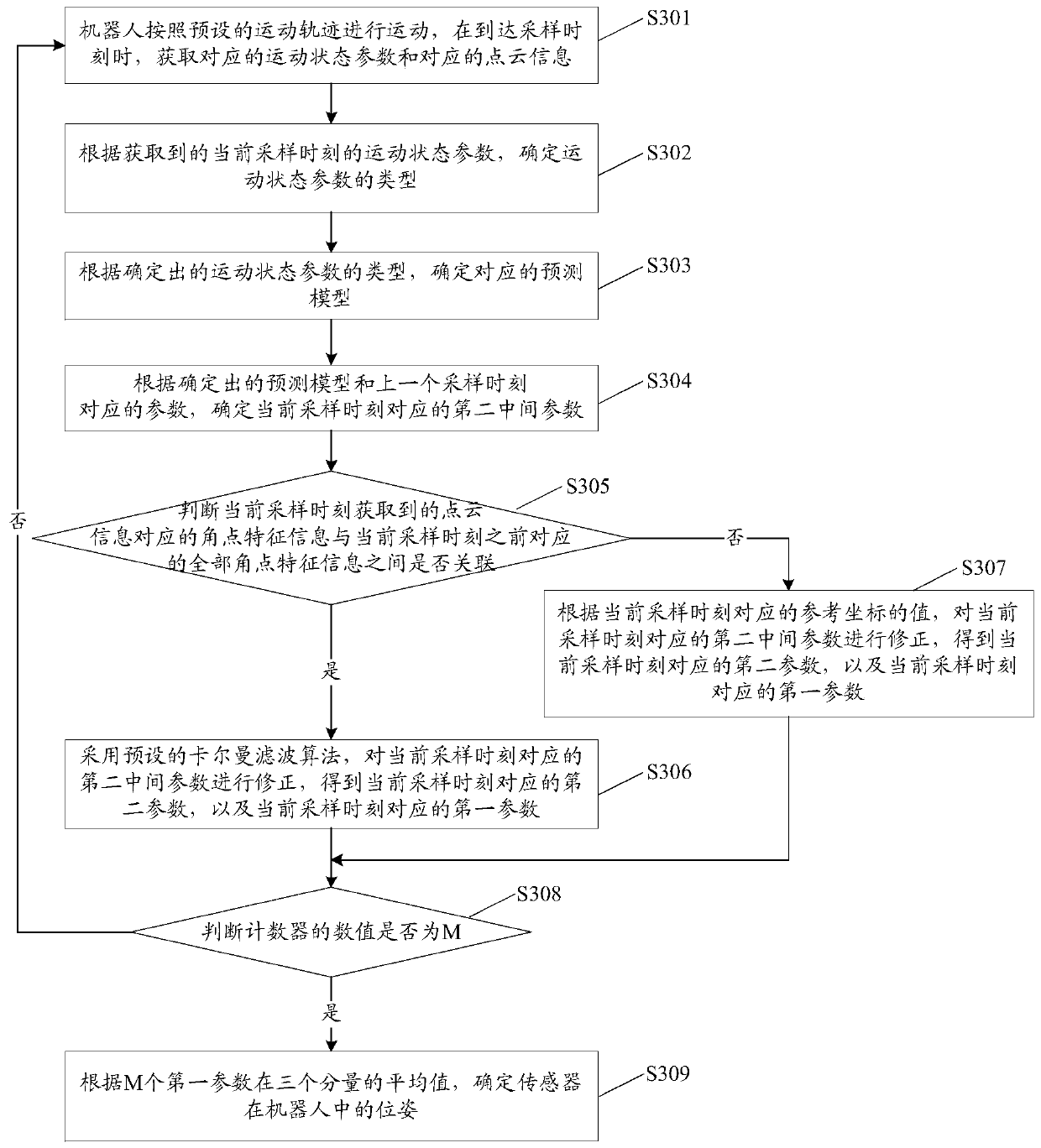
[0212] Embodiment 1: Taking the standard deviation of the three components of the M first parameters as determined to be less than the second preset threshold as an example, combined with image 3 shown.
[0213] S301. The robot moves according to a preset movement trajectory, and acquires corresponding movement state parameters and corresponding point cloud information when the sampling moment is reached;
[0214] S302. Determine the type of the motion state parameter according to the acquired motion state parameter at the current sampling moment;
[0215] S303. Determine a corresponding prediction model according to the determined type of motion state parameter;
[0216] S304. Determine the second intermediate parameter corresponding to the current sampling time according to the determined prediction model and the parameter corresponding to the previous sampling time;
[0217] Wherein, when the current sampling time is the first sampling time, the previous sampling time is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More