Low-sight-distance vehicle safe driving control method
A driving control and line-of-sight technology, which is applied in the field of safe driving control of low-line-of-sight vehicles, and can solve problems such as congestion, shortening of the driver's line of sight, and traffic accidents.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to facilitate those skilled in the art to understand the technical solution of the present invention, the technical solution of the present invention will be further described in conjunction with the accompanying drawings.
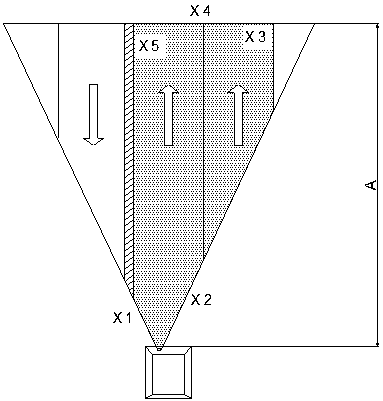
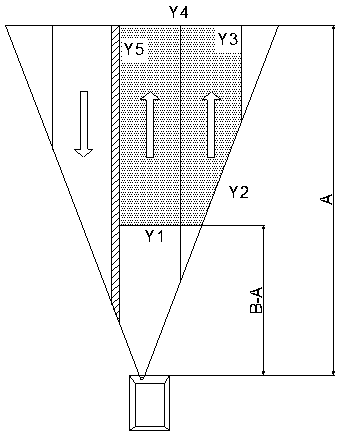
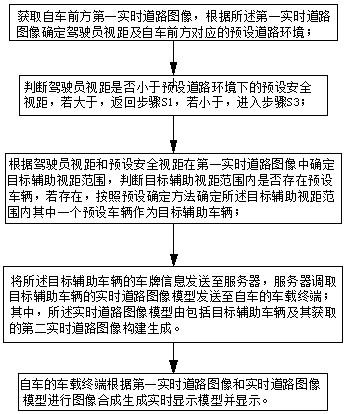
[0031] An embodiment of the present invention provides a method for controlling safe driving of a low-sight vehicle, such as figure 1 shown, including:
[0032] S1: Obtain the first real-time road image in front of the vehicle, and determine the driver's sight distance and the corresponding preset road environment in front of the vehicle according to the first real-time road image;
[0033] In the embodiment of the present invention, the first real-time road image in front of the vehicle is obtained through the simulated camera of the vehicle terminal, and the simulated camera is installed at a position corresponding to the driver's eyes. value setting. Due to people's congenital or acquired visual defects, the eyesight and sight distance...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More