

Pan-tilt visual control system and control method
A vision system and control method technology, which is applied in the direction of using feedback control, image data processing, instruments, etc., to achieve the effect of improving speed and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
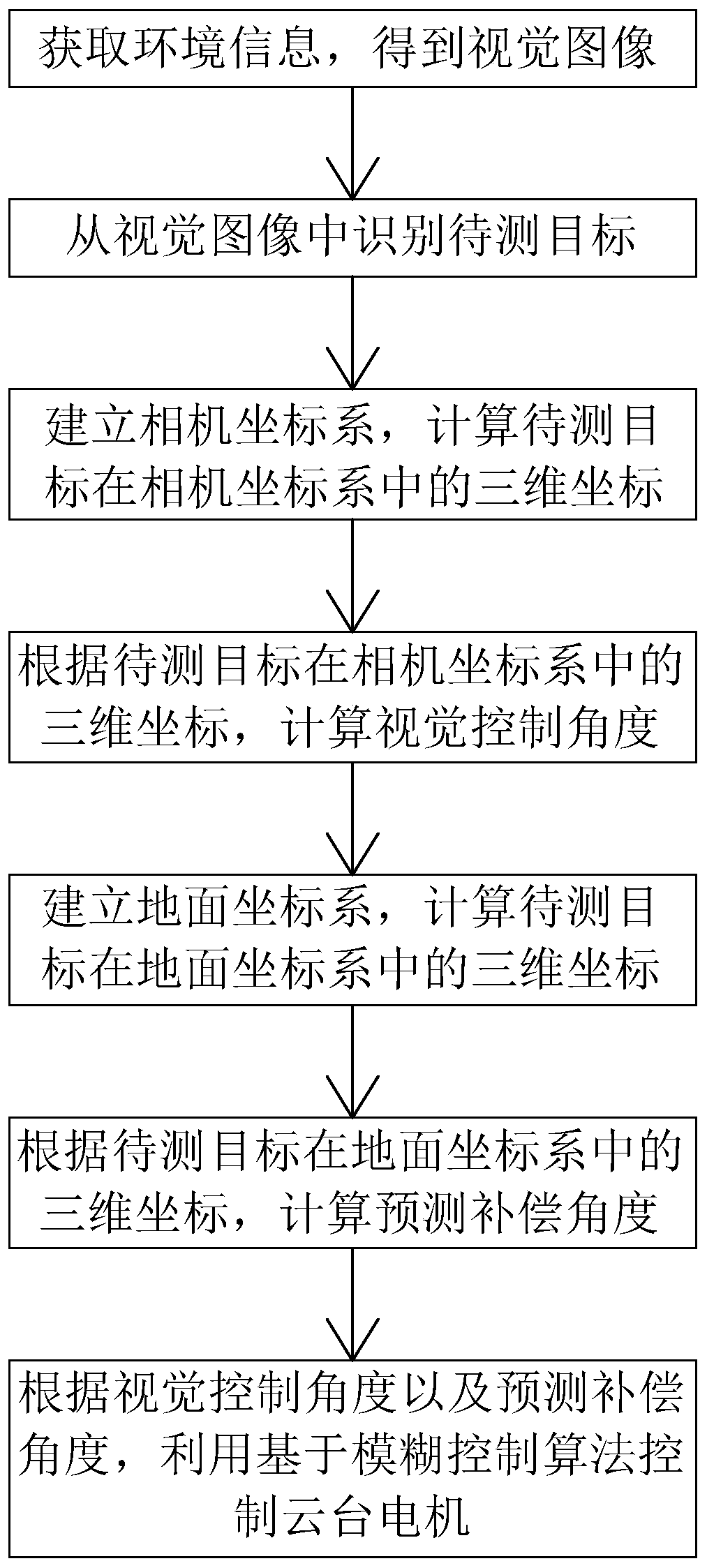
[0042] refer to figure 1 , the application discloses a control method of a pan-tilt vision system, its first embodiment, comprising the following steps:
[0043] Step 100, acquiring environmental information, obtaining a visual image, and performing preprocessing on the visual image;
[0044] Step 200, identifying the target to be tested from the visual image;
[0045] Step 300, establishing a camera coordinate system, and calculating the three-dimensional coordinates of the target to be measured in the camera coordinate system;
[0046] Step 400, calculating a vision control angle according to the three-dimensional coordinates of the target to be measured in the camera coordinate system, where the vision control angle includes a yaw angle and a pitch angle of the target to be measured relative to the camera coordinate system;
[0047] Step 500, establishing a ground coordinate system, and calculating the three-dimensional coordinates of the target to be measured in the grou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More