

Gripper structure of truss manipulator
A manipulator and gripper technology, applied in the field of truss manipulator gripper structure, can solve the problem of high cost of multi-jaw manipulators, and achieve the effects of improving clamping stability and flexible connection structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The standard parts used in the present invention can be purchased from the market, and the special-shaped parts can be customized according to the instructions and the accompanying drawings. The specific connection methods of each part adopt mature bolts, rivets, welding in the prior art , pasting and other conventional means, no longer described in detail here.
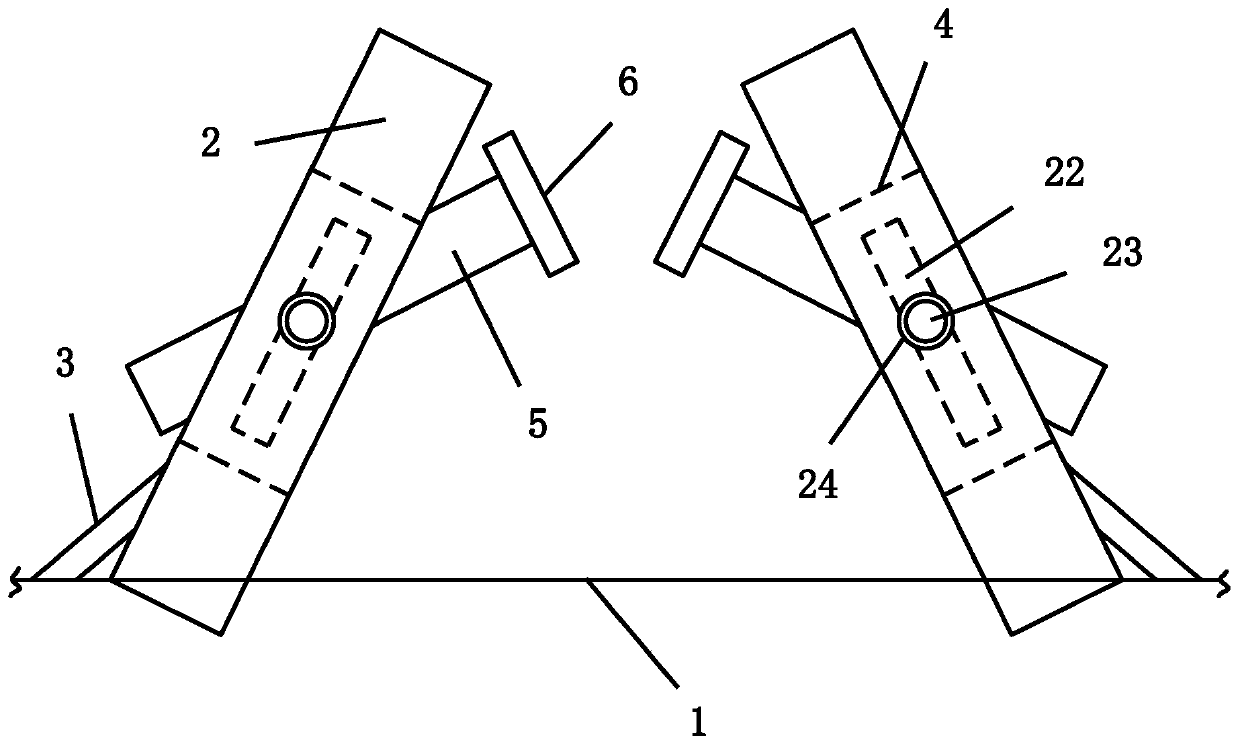
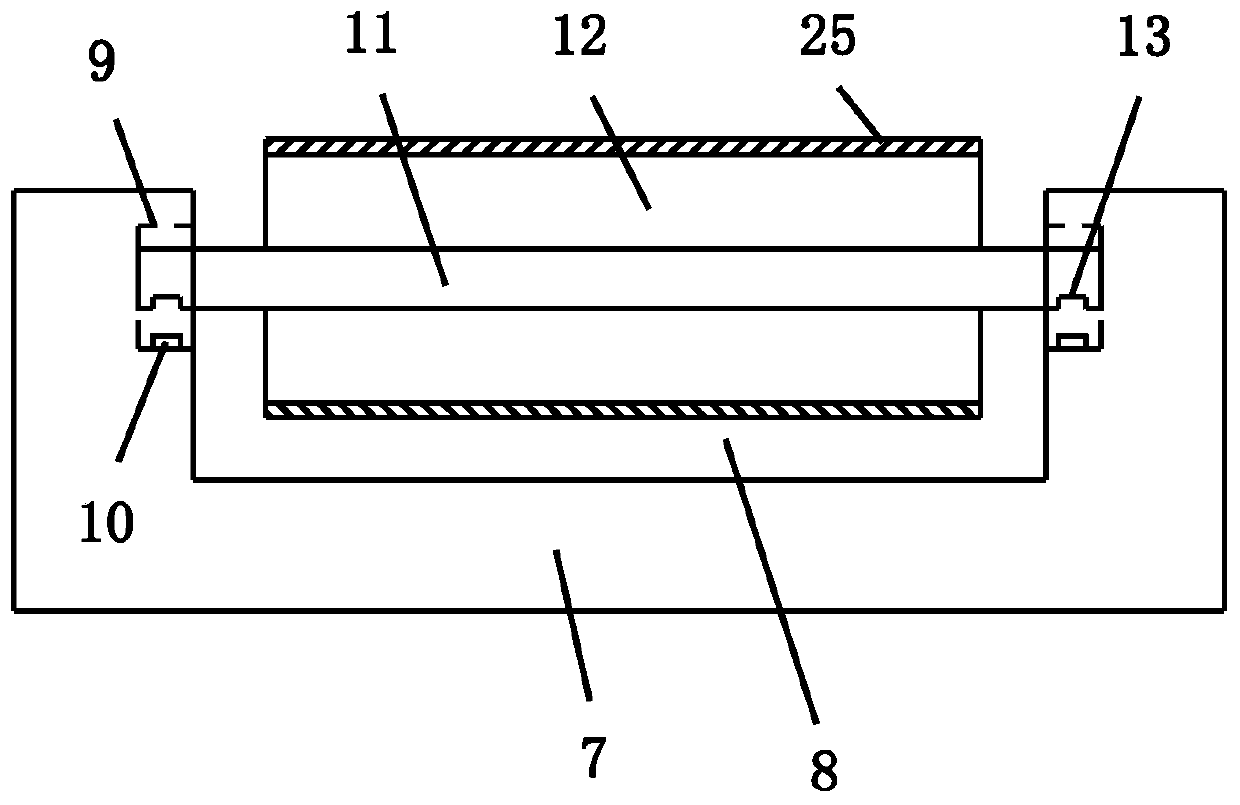
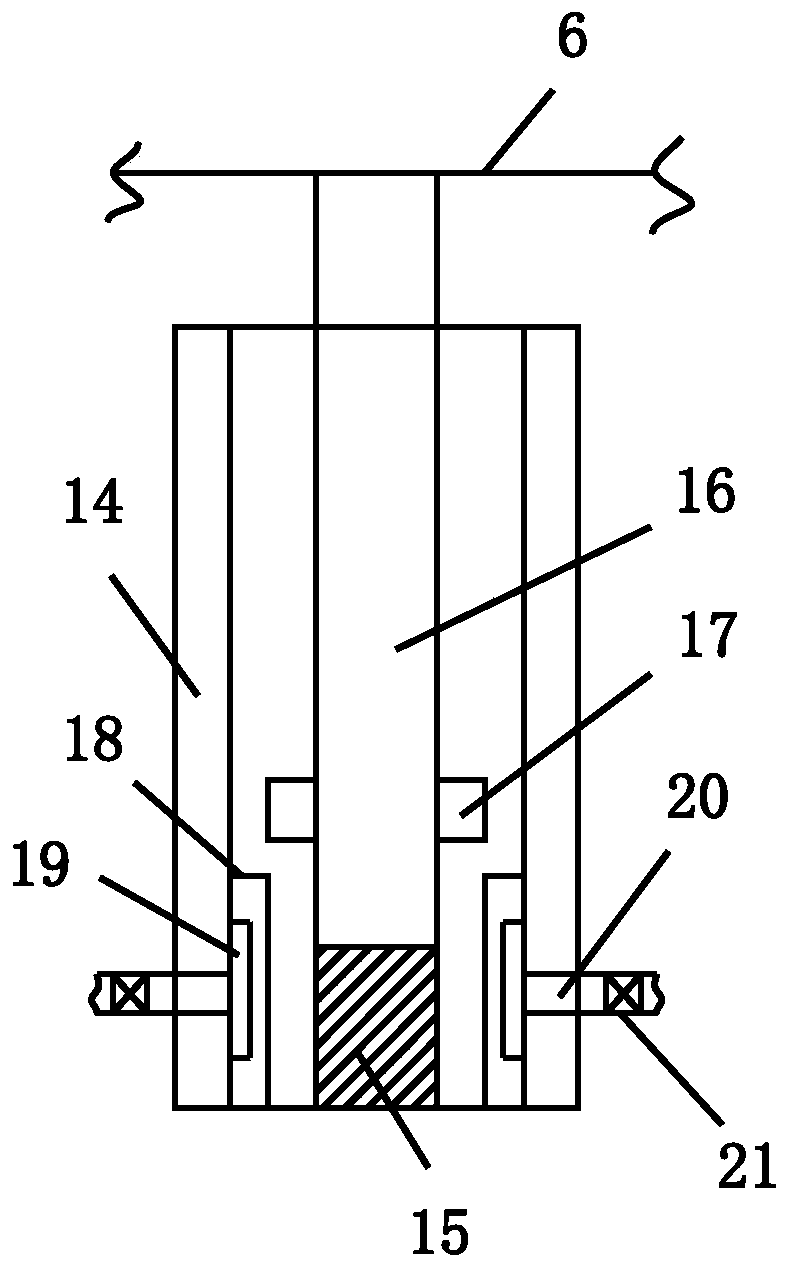
[0018] refer to Figure 1-4 , a specific embodiment of the present invention includes a base 1, two claw arms 2 are pivoted on the base 1, the claw arms 2 are driven by an oil cylinder 3, and a through groove 4 is arranged on the claw arm 2, and the movement in the through groove 4 An elastic connecting rod 5 is connected, and the elastic connecting rod 5 is connected with a clamping disc 6; the clamping disc 6 includes a disc body 7, and the surface of the disc body 7 is provided with a mounting groove 8, and the side wall of the mounting groove 8 is provided with a first chute 9 , the bottom end of the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More