

Double-arm collaborative robot three-dimension vision recognizing and grabbing method based on deep learning
A deep learning and three-dimensional vision technology, applied in the field of robot vision, can solve the problems of difficult implementation, inability to solve the problem of two-arm cooperation, and inability to install multiple cameras on the end of the robot arm, so as to improve the ability of operation collaboration and space planning, Increase intelligence and applicability, and facilitate the effect of promotion and use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples.
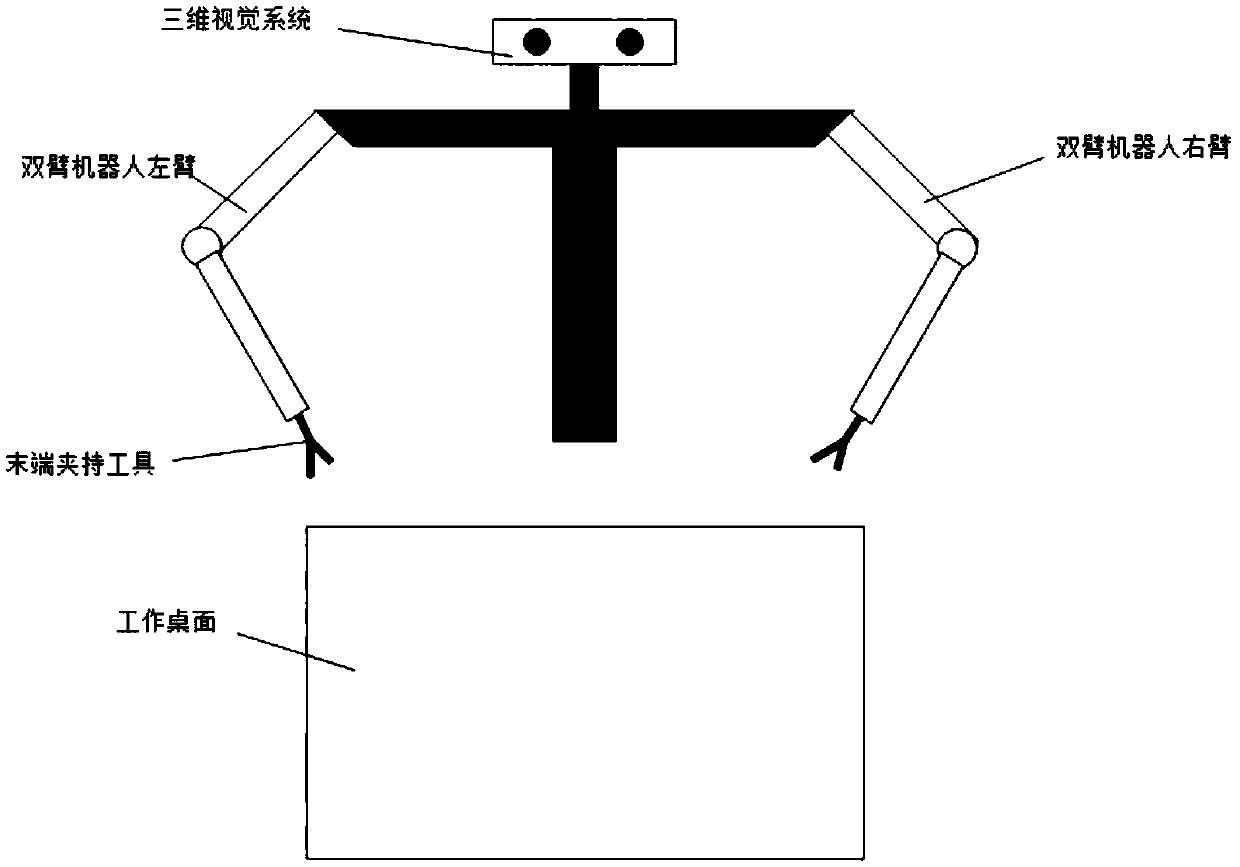
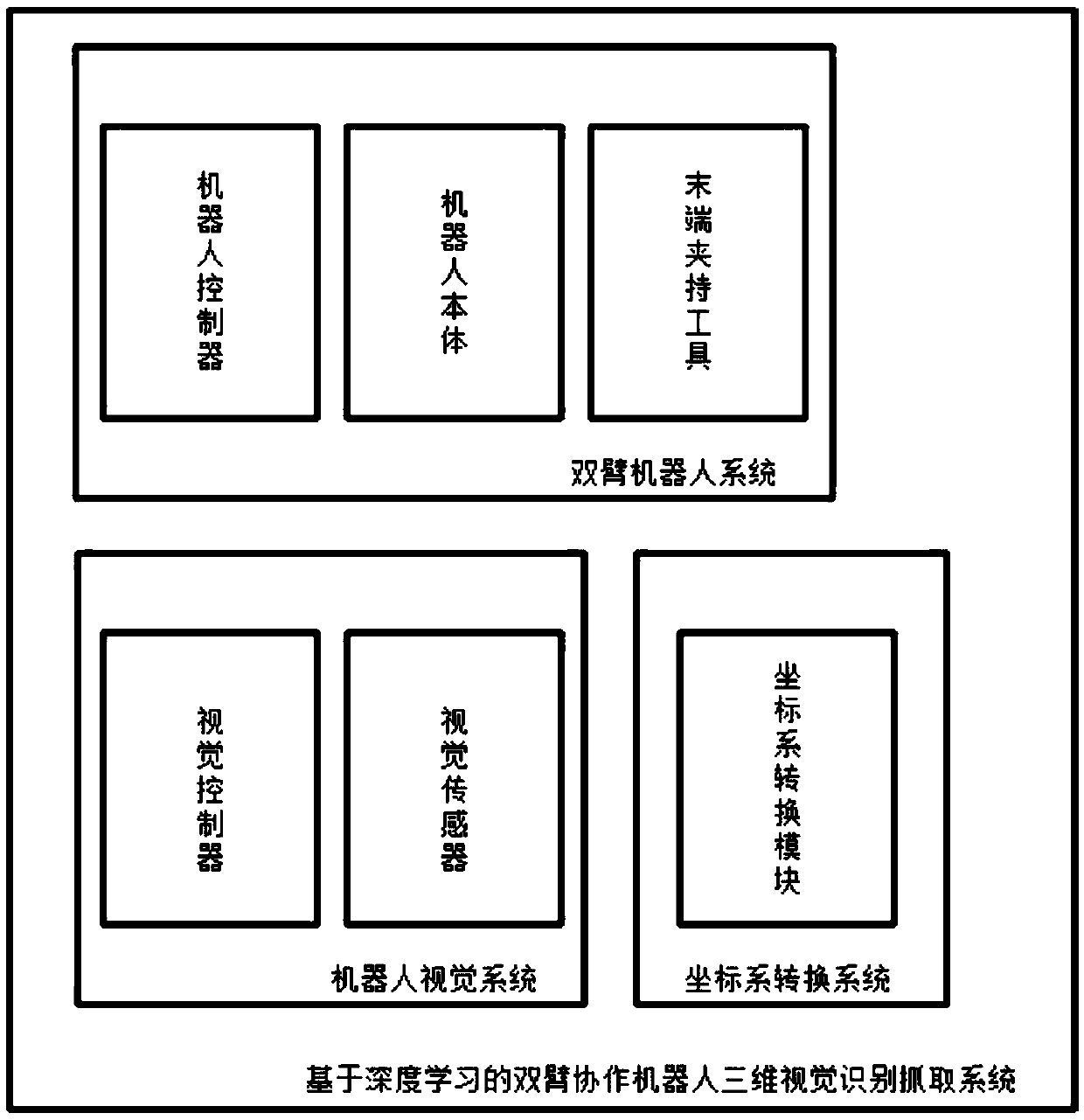
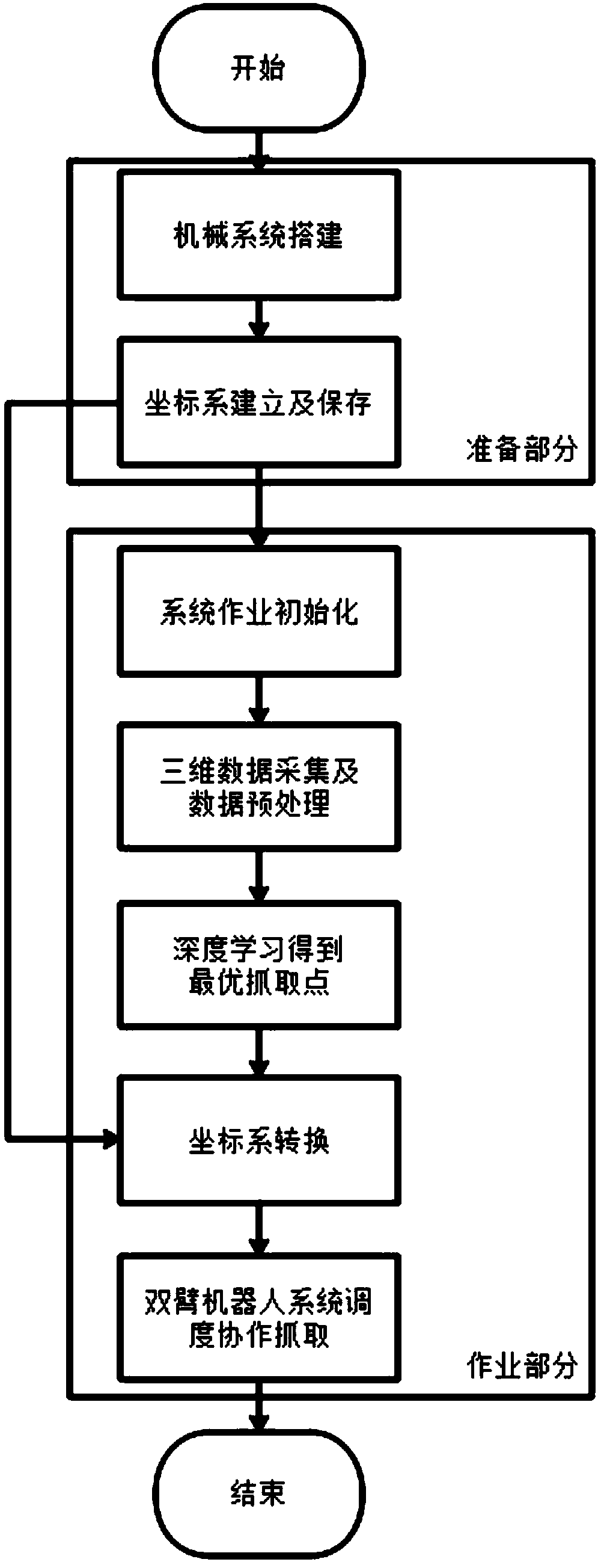
[0032] A 3D vision recognition and grasping method for a dual-arm collaborative robot based on deep learning, including the functions of the dual-arm robot and the coordinate system 1 of the 3D vision system, the 3D visual data processing process, and the collaborative processing process.
[0033] Coordinate system of dual-arm robot and 3D vision system mainly refers to:
[0034] Set the desktop coordinate system logo in the work area of the dual-arm robot, identify the logo and establish the coordinate system through the visual system, and obtain the conversion relationship between the visual system coordinate system and the desktop logo coordinate system; the left and right arms of the dual-arm robot are respectively used to establish...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More