

Method and device for estimating torque
A transmission device and function technology, applied in the field of torque estimation and device, can solve problems such as difficult determination and complex measurement error, and achieve the effects of accurate results, increased redundancy, and cost-effective design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
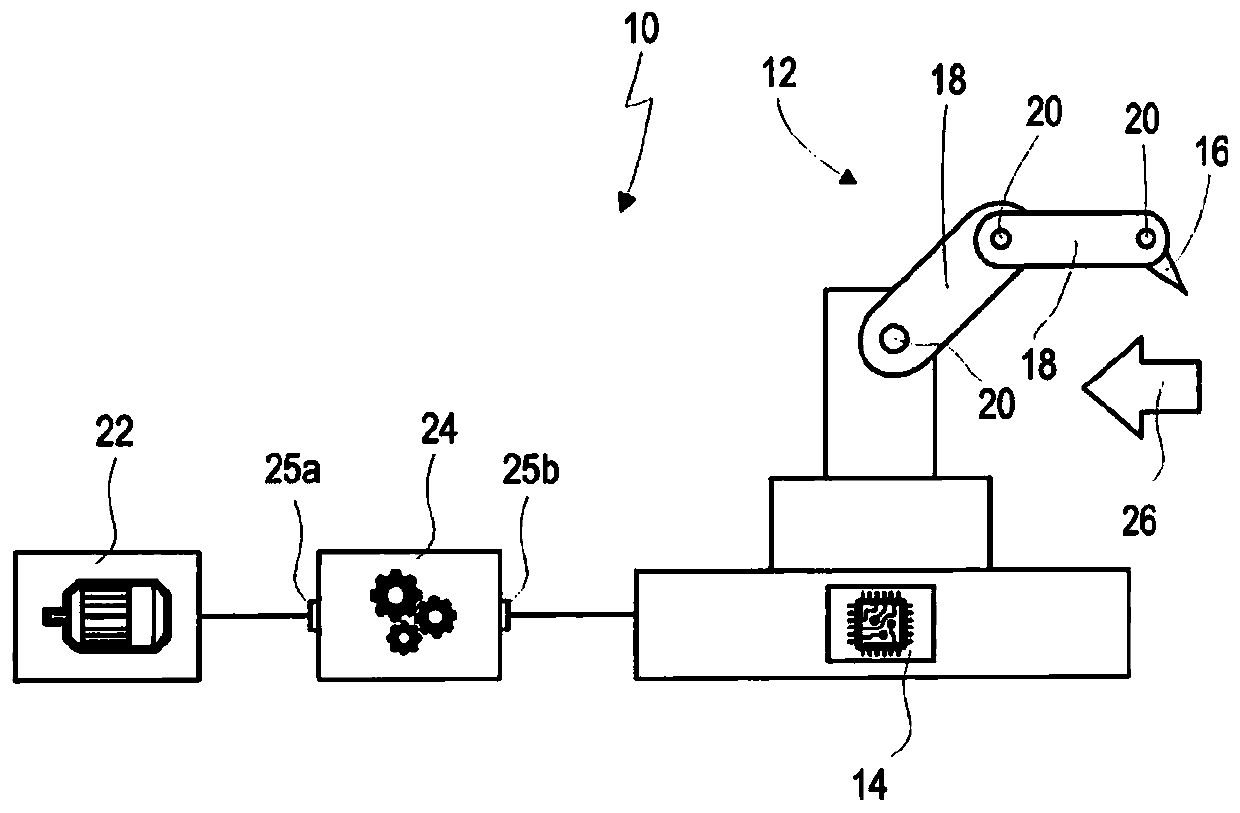
[0035] exist figure 1 In , the robot according to the exemplary embodiment of the present invention is generally indicated by reference numeral 10 .
[0036] In this exemplary embodiment, robot 10 is an industrial robot. Industrial robots are general purpose programmable machines used to handle, assemble or process workpieces. The industrial robot comprises a manipulator 12 (robot arm), a controller 14 and an actuator 16 which may be designed as a tool or gripper.
[0037] For example, figure 1 The manipulator 12 shown in has two links 18 and three joints 20 . It goes without saying, however, that the invention is not limited to the number of links and joints shown here. Instead, the method presented here can be applied to multiple individual joints.
[0038] The link 18 of the manipulator 12 moves via a joint 20 and is driven by a drive 22 which is connected to the robot 10 via a transmission 24 . The transmission 24 and drive 22 are shown separately from the manipulato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More