A multi-finger mechanism-based method for capturing the envelope of tumbling targets in 3D space
A three-dimensional space and target technology, applied in the aerospace field, can solve the problems of complex rotational motion, lack of, and loss of attitude adjustment capabilities, and achieve good compatibility, improve computing efficiency, and simplify the system's degree of freedom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0052] A three-dimensional space tumbling target envelope capture method based on a multi-finger mechanism, the specific steps of which include:
[0053] S100, establishing a structural description model of the multi-finger mechanism.
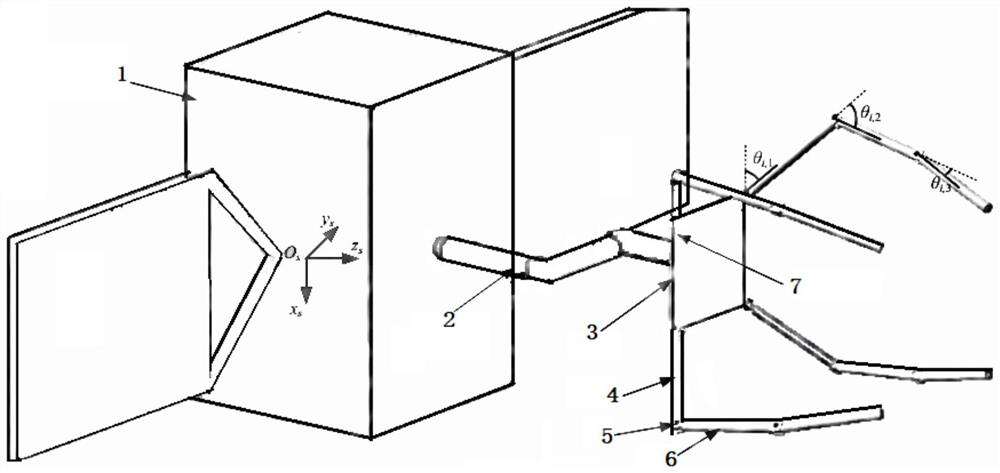
[0054] First, determine the relative positions between the base joints of each finger 4 of the multi-finger mechanism. Such as figure 1 As shown, the multi-finger mechanism is connected with the service satellite through the mechanical arm 2. The multi-finger mechanism is composed of a palm 3 and n fingers 4, wherein each finger 4 is also composed of m connecting rods 6 and m single-degree-of-freedom rotary joints 5. Constrained by the mechanism of the multi-finger mechanism, the base joint finger position P of the i-th finger 4 b_i and the base joint finger position P of the jth finger 4 b_j satisfy the following relationship:
[0055] P b_j =P b_i +δ ij (j≠i,i≤n,j≤n) (3)
[0056] Among them, δ ij is the base joint finger position P ...
example
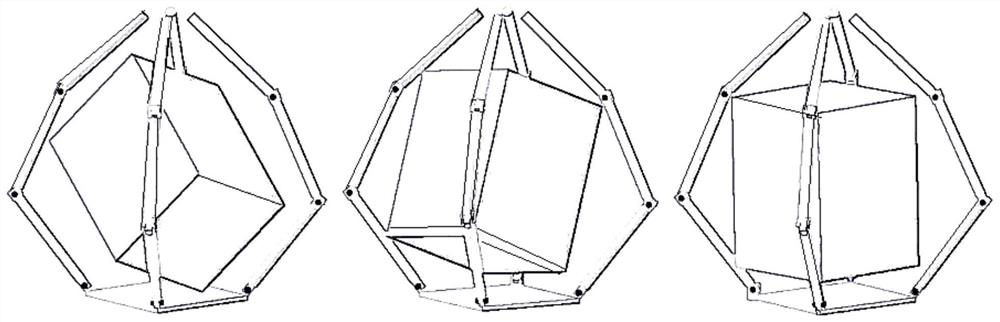
[0116] The present invention takes figure 1 Envelopment using 4-finger and 3-joint multi-finger mechanism shown Figure 4 The object in is specific embodiment, and the present invention is further described:
[0117] Suppose the length of each connecting rod 6 is d l =0.25m, the value range of joint angle is θ i ∈[-90°,90°]; the initial value of all joint angles of the multi-finger mechanism is θ i = 0°; the number of the main finger is 1; the positional relationship between the base joints of the multi-finger mechanism is as follows Image 6 shown. The length, width and height of the tumbling target in three-dimensional space are 1.2m, 0.6m and 0.4m respectively; the orbital radius is 7100km. initial time t 0 =0s, the coordinates of the envelope point are [0,-0.225,-0.31] T m; the coordinates of the base joint of the main finger is P b_l =[0.5,-0.5,0.5] T m; the relative position vector is ρ ij (t 0 )=[-9,16,18] T m; Further, let T=0.1s; N c =20;N p =20; u ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap