Earth-moon transfer orbit engine trial injection method
A technology for transferring orbits and engines, which is applied in the direction of motor vehicles, astronautical vehicle guidance devices, and astronautical equipment, etc., can solve the problems such as the shortage of flight procedures and measurement and control resources, the difficulty of controlling the transfer orbit of the earth and the moon, and the large speed increment, etc. Achieving the effect of good engineering operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
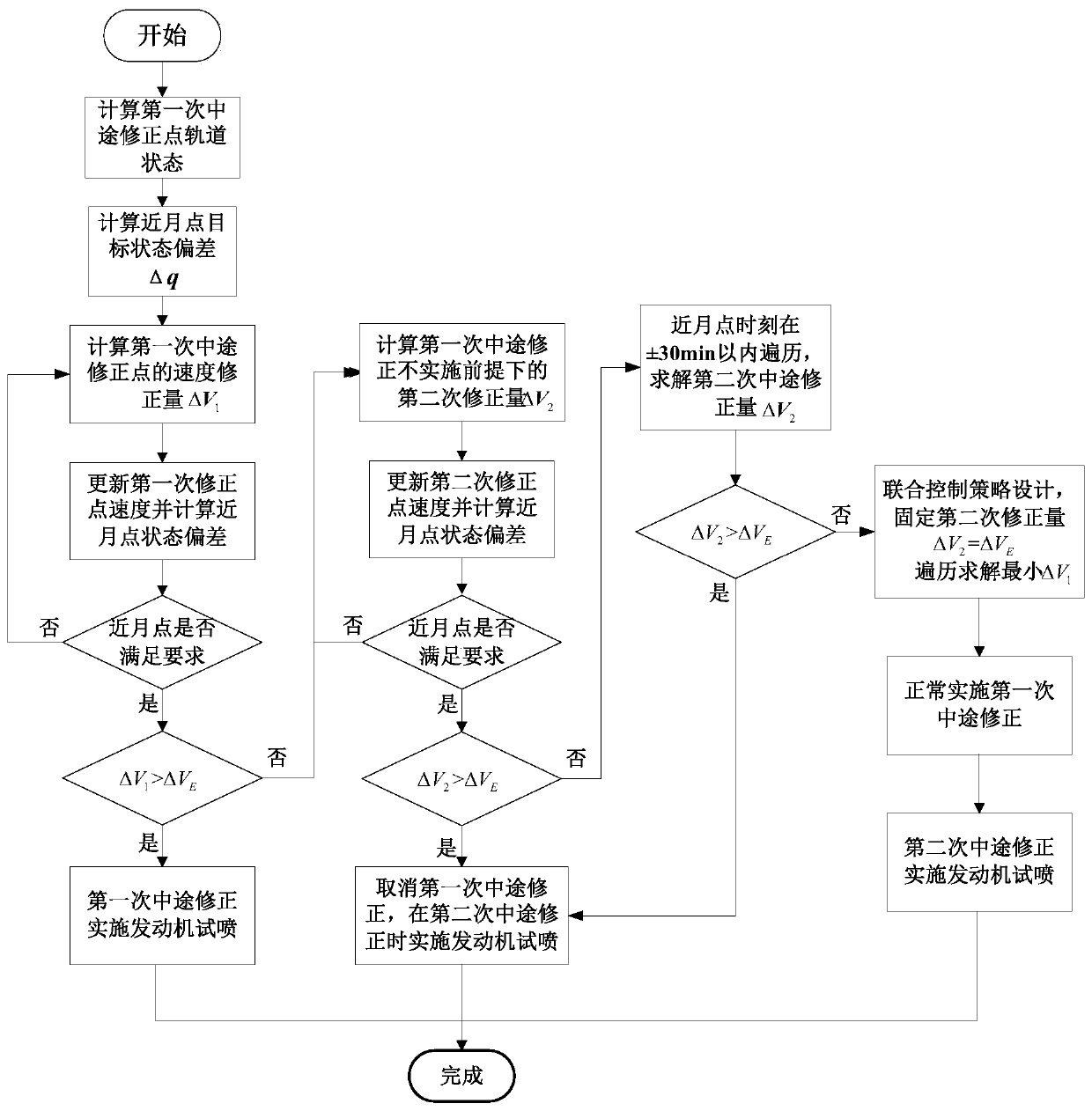
[0019] The present invention will be described in detail below with reference to the accompanying drawings and examples.
[0020] The invention provides a method for test spraying of an engine on an earth-moon transfer track, which considers implementing the test spraying of the engine when the earth-moon transfer is corrected midway. The midway correction of the earth-moon transfer is used to correct the orbit deviation caused by errors such as loading into orbit and orbit determination, so as to ensure that the probe can reach the moon in the expected near-moon state. Generally, 3 midway corrections are arranged for the Earth-Moon transfer segment, and 1-2 midway corrections will be canceled in actual flight according to orbital parameters and control implementation. However, the amount of orbit change in the midway correction is usually small, and it is not necessary to use a large-thrust engine to implement it. Especially in the case of launch and orbit determination with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More