A fusion method of star-sensing and gyroscope data suitable for attitude maneuvering conditions
A technology of attitude maneuvering and data fusion, which can be used in combined navigators, navigation calculation tools, etc., can solve the problem of inaccurate attitude estimation, achieve good engineering operability, simple algorithm principle, and avoid the linearization requirements of Kalman filtering.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
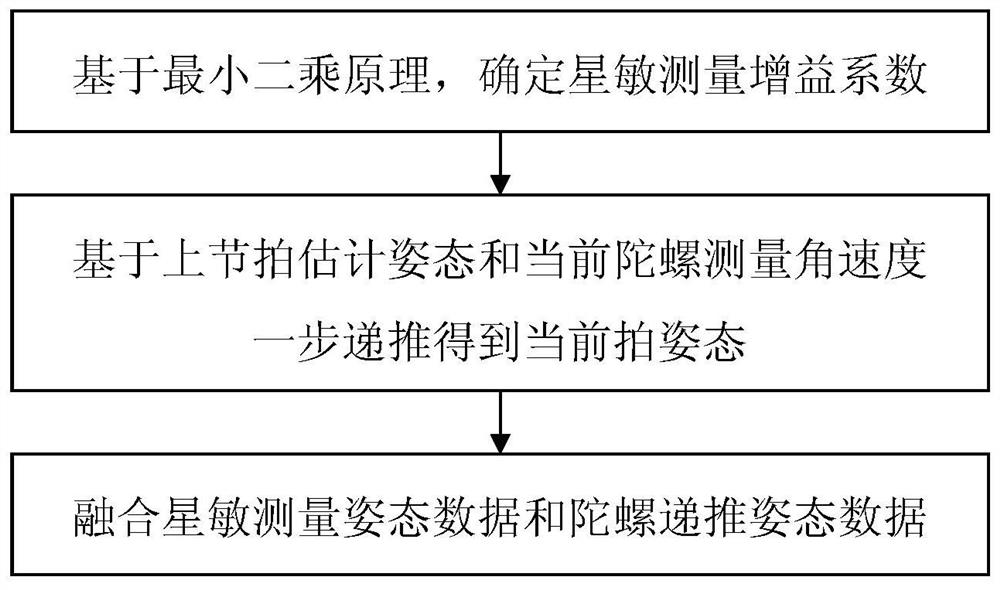
[0017] The method of the present invention will be further described in detail in conjunction with examples below.
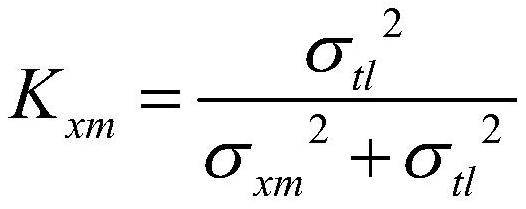
[0018] First: Based on the principle of least squares, determine the star-sensitive measurement gain coefficient K xm
[0019]
[0020] Among them, σ tl is the gyro integral attitude white noise, σ xm Measure attitude white noise for Xingmin.
[0021] Description: σ tl and σ xm It can be estimated online based on measurement data, or can be determined by betting on the ground.
[0022] Specifically: if the current beat of the gyroscope fails, it can be regarded as σ tl →∞, at this time K xm = 1; similarly, if Xingmin’s current beat fails, it can be regarded as σ xm →∞, at this time K xm =0
[0023] Second: Estimate the attitude based on the upper beat and the current gyroscope measured angular velocity One-step recursion to get the current shooting posture
[0024]
[0025] in: for The norm of , Φ is the Euler axis rotation angle, fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More