Unlock instant, AI-driven research and patent intelligence for your innovation.
An Intelligent Control Method of Adjacent State Bias for Jump System with Unknown Transition Probability
What is Al technical title?
Al technical title is built by PatSnap Al team. It summarizes the technical point description of the patent document.
An intelligent control and transition system technology, applied in the field of engineering systems, can solve the problem that the transition probability information cannot be known in advance
Active Publication Date: 2021-04-02
JIANGNAN UNIV
View PDF9 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, in the application process, the transition probability information of most practical systems cannot be known in advance, which makes the traditional control methods described by linear matrix inequalities or Riccati equations have their limitations
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0055] This embodiment provides an intelligent control method for adjacent-state deviation using an unknown transition probability jump system for the control problem of the DC motor jump circuit system in engineering technology. The method includes:
[0056] Step 1: Establish a discrete Markov jump system model of the DC motor jump circuit system. First, the motor dynamics of the DC jump circuit are described as:
[0057]
[0058]
[0059] Among them, r(t)=1, 2, 3 respectively represent the working states of the motor in three power modes: normal power, low power, and medium power. The system has different parameters in different working modes. t is the continuous time, u(t) is the total input voltage, i is the motor current, v(t) is the angular velocity of the motor; K m is the motor load constant, K e is the counter electromotive force constant, K d is the damping constant, R m is the total resistance of the circuit connection, L is the inductance; J is the mecha...
Embodiment 2
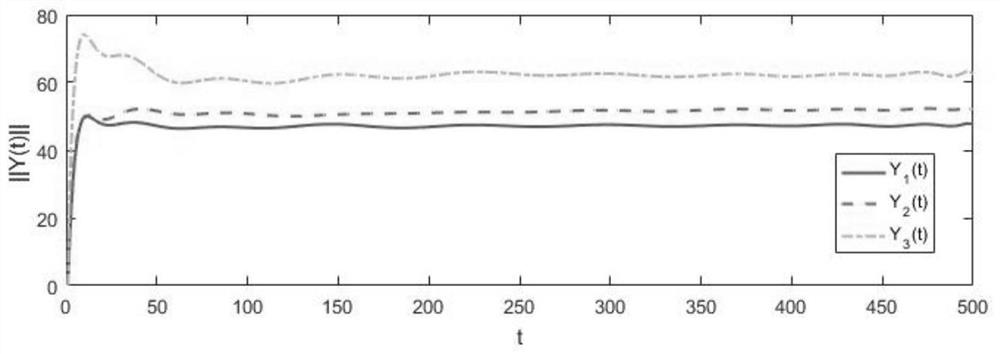
[0099] In this embodiment, aiming at the DC motor jump circuit, an intelligent control method for adjacent state deviation of an unknown transition probability jump system is provided for simulation experiment verification. In order to verify the effectiveness of the proposed method, the parameters of the discrete Markov jump system are described as follows :
[0100]
[0101] B 1 =B 2 =B 3 =(0 1) T ,
[0102]
[0103] D. 1 =D 2 =D 3 =(0 0 1) T , G 1 =G 2 =G 3 =(0 0.1) T .
[0104] Without loss of generality, the transition probability matrix is selected to obey the Gaussian random distribution, and the randomness is described by the following Gaussian probability density matrix:
[0105]
[0106] Among them, n(μ,σ) represents the Gaussian transition probability density function, μ is the mean, and σ is the variance.
[0107] Select the modal trajectory length K=20, the number of trajectories T=500, the weight rate λ=0.1, and the anti-interference pe...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses an adjacent state deviation intelligent control method of an unknown transition probability hopping system and belongs to the field of engineering systems. The method comprisesthe following steps of for a Markov jump system, describing uncertainty of the modal transition probability of the Markov jump system by an unknown distribution, and establishing an anti-interferencecontrol problem model; secondly, constructing an updating form of a modal dependence value function; obtaining a modal track according to the input control strategy, and calculating adjacent state deviation so as to update the value function till convergence; and finally, optimizing a control strategy according to the value function, and repeating the process till the control strategy converges,thereby obtaining a controller which can enable a system closed loop to be stable and meet the specified interference suppression performance. The Markov jump system control method solves a control problem of the Markov jump system under the condition that the transition probability is completely unknown, and has very important practical significance.
Description
technical field [0001] The invention relates to an intelligent control method for an adjacent state deviation of an unknown transition probability jump system, which belongs to the field of engineering systems. Background technique [0002] For several years, the control problem of Markov (Markov) jump system has been one of the research hotspots in the field of control. As a typical multimodal stochastic system, the Markov jump system can be used to simulate a dynamic system with mutation characteristics, generally a dynamic system with random mutation characteristics due to external environment disturbance or changes in internal structure and parameters, such as Industrial systems, fault-tolerant control systems, network control systems, etc. Transition probability, as a key factor of the system, describes the random dynamic characteristics of mode hopping. [0003] Under the condition that the transition probability is known or partially known, the research on Markov ju...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.


 Login to View More
Login to View More  Login to View More
Login to View More