

Enveloping under-actuated robot gripper
A robotic hand and underactuated technology, which is applied in the field of robot gripper devices and underactuated robot grippers, can solve the problems of complex drive structure, small envelope range, and inflexibility, etc., and achieve simplified gripper structure and large grasping range , cost reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
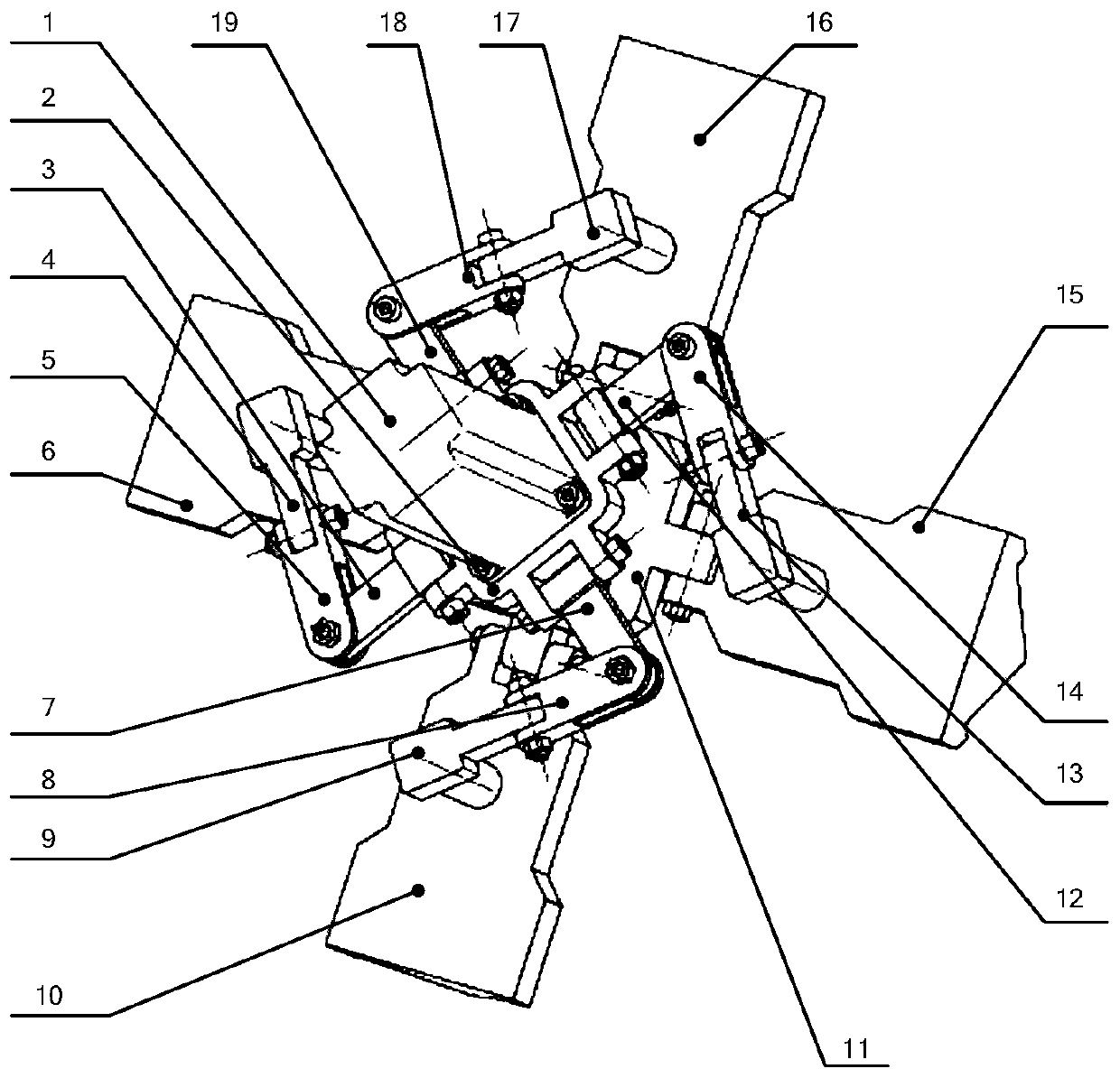
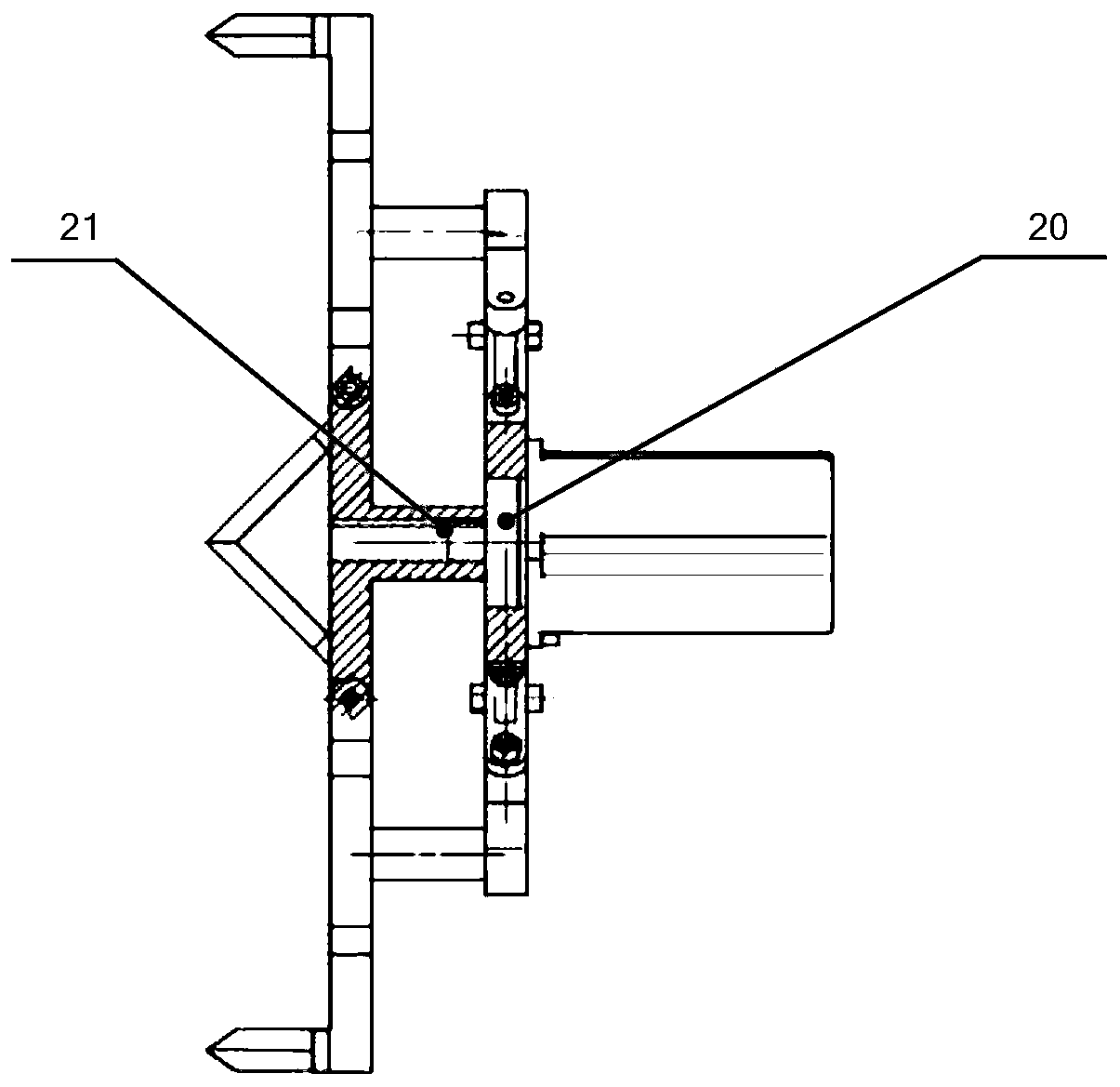
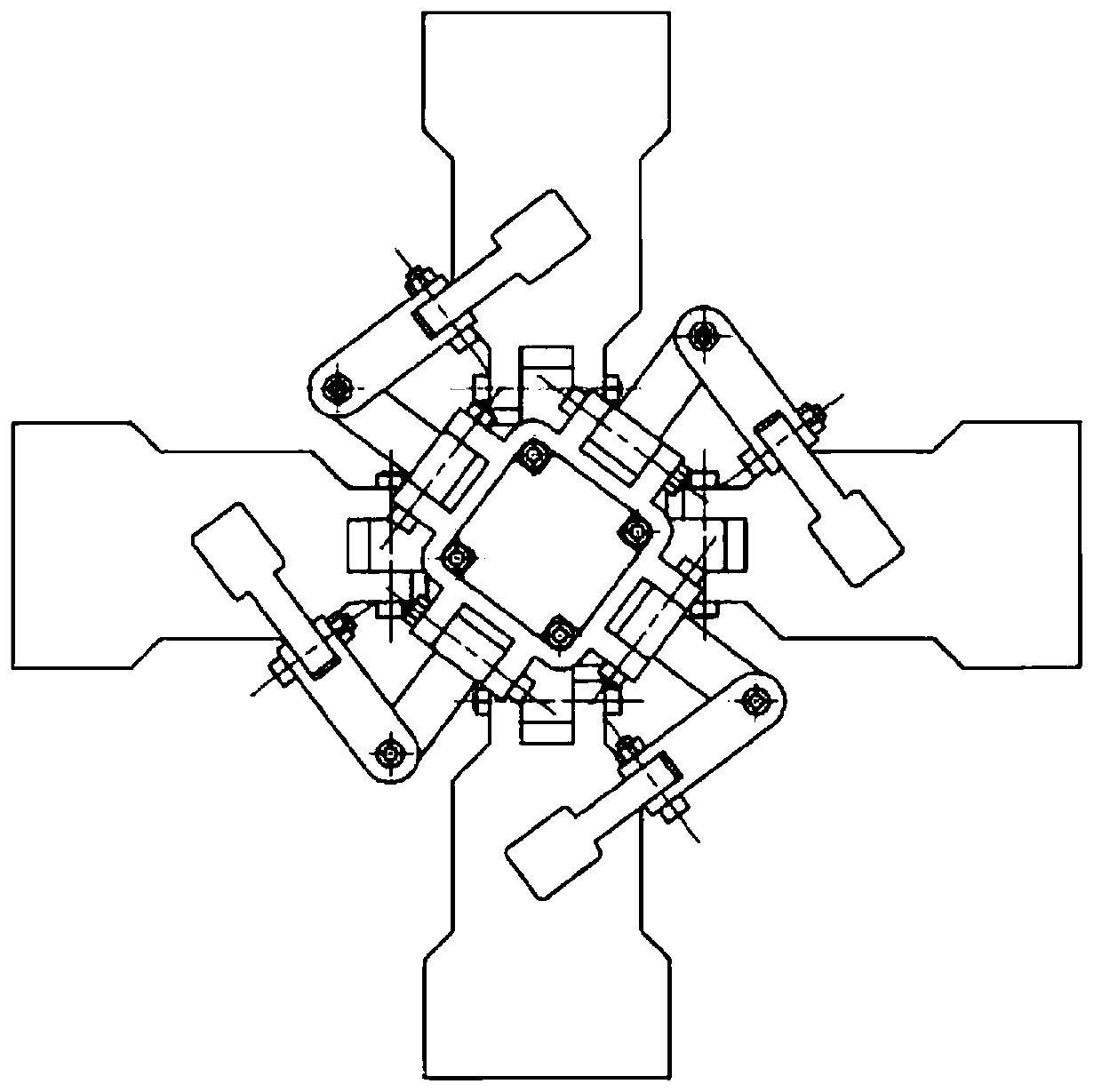
[0033] In this example, see Figure 1-Figure 5 , an envelope-type underactuated robot gripper, which includes a drive motor 1, a drive base 2, an envelope-type robot gripper structure composed of four finger units, a movable base 11, and a drive pad 20 And connection key 21; wherein the first finger unit includes the first drive seat connecting rod 3, the first receiving link 5, the first jaw connecting rod 4, the first claw plate 6; the second finger unit includes the second drive seat connecting rod Rod 7, second connecting rod 8, second jaw connecting rod 9, second jaw plate 10; the third finger unit includes third driving seat connecting rod 12, third receiving connecting rod 14, third jaw connecting rod 13. The third claw plate 15; the fourth finger unit includes the fourth drive seat connecting rod 19, the fourth connecting rod 18, the fourth jaw connecting rod 17, and the fourth claw plate 16; the driving motor 1 is the power source, which can A torque is provided to d...
Embodiment 2
[0046] This embodiment is basically the same as Embodiment 1, especially in that:
[0047] In this embodiment, the envelope-type underactuated robot gripper of this embodiment is used for mounting on a carrier platform, especially on a mechanical arm, for fixing. The enveloping underactuated robotic gripper in this embodiment has a wide range of uses, and can realize the opening and closing of the gripper with one driving source. The base platform is required to be assembled and fixed with the drive motor. The above functions ensure the advantages of low cost, energy saving, flexibility and light weight.
[0048] Based on the above embodiments, it can be seen that the envelope-type underactuated robot gripper can solve the problems of the existing mechanical robot grippers such as large movement stroke, complex mechanism, and large number of parts. It includes a driving motor, a base, a driving seat, a driving spacer, a connection key between the motor and the movable base, f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More