Crawler-type deformation robot
A robot and crawler-type technology, applied in the field of robots, can solve the problems of incompatibility of robot actions, slow deformation, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific structure of the present invention is clearly and completely described below in conjunction with the embodiments and accompanying drawings, so as to fully understand the present invention. It should be noted that, based on the specific implementation manner of the present invention, the non-substantial modified structures made by those skilled in the art without creative work all belong to the scope of protection of the present invention.
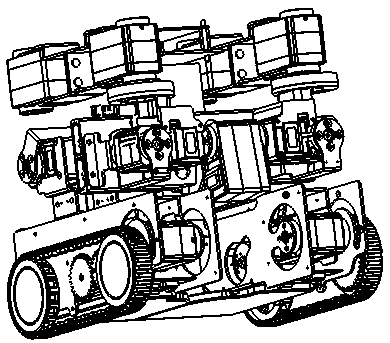
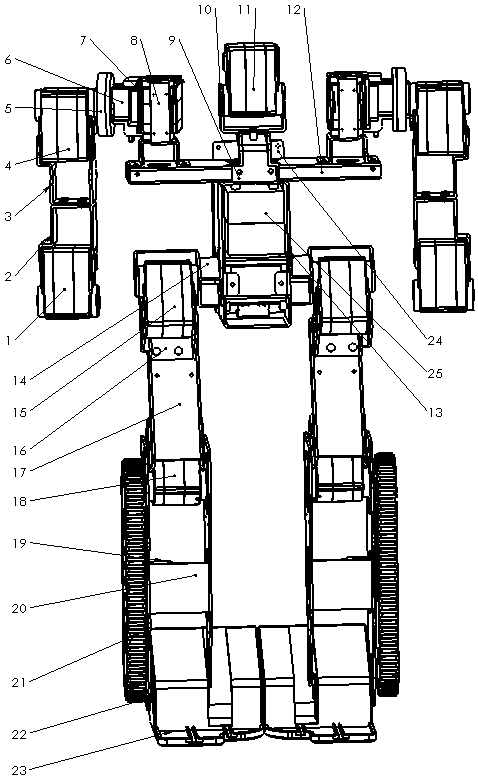
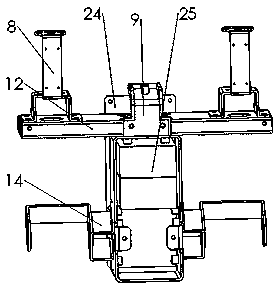
[0021] The invention provides a crawler-type deforming robot, which is characterized in that it comprises a robot body, a head structure connected to the upper part of the robot body, an arm structure connected to both sides of the upper part of the robot body, and a leg structure connected to both sides of the lower part of the robot body ; The head structure, the leg structure and the arm structure are all connected to the robot body through a driving device and realize a rotational connection; the driving device is a b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More