

Unmanned aerial vehicle inspection path planning method based on random optimization
A technology of random optimization and inspection path, applied in the direction of navigation calculation tools, etc., can solve the problems of difficulty in ensuring the efficient execution of UAV tasks, and failure to comprehensively consider the business needs of UAV systems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0066] In order to illustrate the embodiments of the present invention more clearly, the specific implementation manners of the present invention will be described below with reference to the accompanying drawings. Obviously, the accompanying drawings in the following description are only some embodiments of the present invention, and those skilled in the art can obtain other accompanying drawings based on these drawings and obtain other implementations.
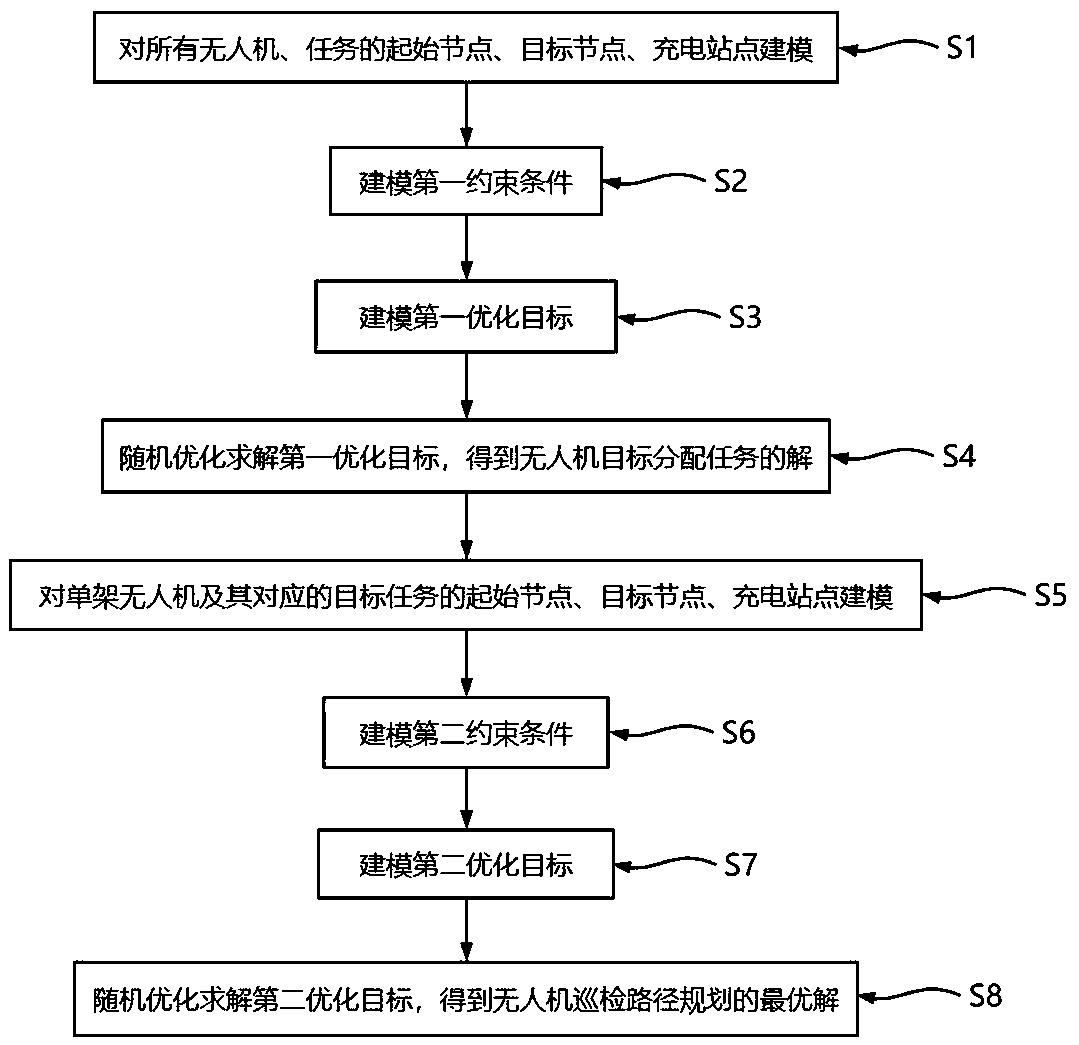
[0067] The UAV inspection path planning method based on random optimization in the embodiment of the present invention is divided into two major contents:
[0068] First, solve the problem of target assignment tasks;
[0069] UAV target assignment task is the main function of the global planning task in the early stage, and the overall task is decomposed into a collection of several single UAV tasks;
[0070] Second, solve the problem of UAV inspection path planning;
[0071] UAV inspection path planning is the core of la...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More