

Loopback detection method based on two-dimensional grid map
A grid map and detection method technology, applied in image analysis, measurement device, image data processing, etc., can solve problems such as large amount of calculation, simple hardware facilities, and no calculation of search space, so as to eliminate accumulated errors and avoid poor real-time performance. , to avoid computationally expensive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
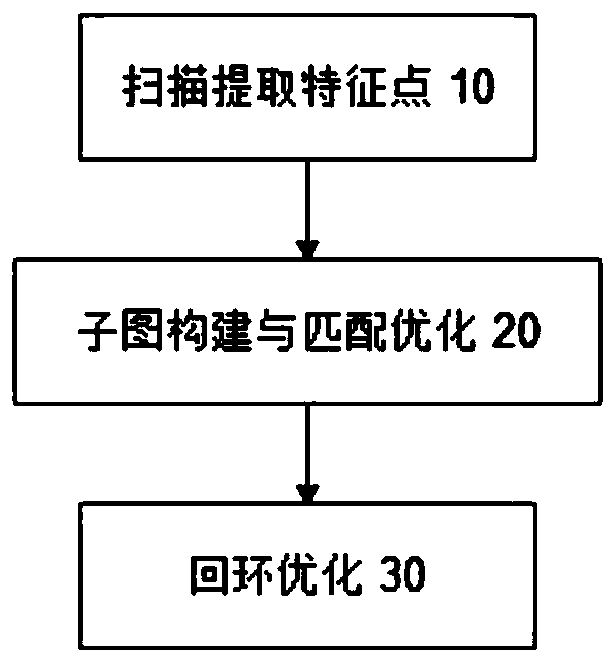
[0014] Such as figure 1 As shown, a kind of loop detection method based on two-dimensional grid map of the present invention comprises the following steps:
[0015] (10) Scanning and extracting feature points: LiDAR generates point cloud information for each frame, and the radar data of each frame is regarded as a scan. First, the scanning points are selected to calculate the curvature, and the feature points on the edge and plane are selected with the curvature as a constraint;
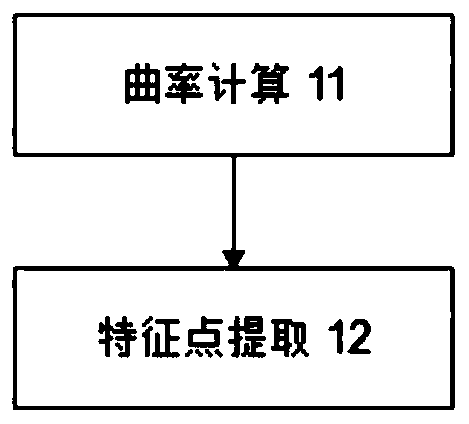
[0016] Such as figure 2 As shown, the scanning feature point extraction step includes:
[0017] (11) Curvature calculation: Assume that the initial scan is empty and expressed as Then enter the radar information to write the scan point information The 5 points on the edge of each scan do not participate in the selection of feature points, because the periphery does not meet the conditions for calculating the curvature of the five points on the left and right; for any point A, select five points...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More