

A three-layer architecture-based path planning method for unmanned vehicles
An unmanned vehicle and path planning technology, applied in vehicle position/route/altitude control, motor vehicle, two-dimensional position/channel control, etc. Good economic benefits, flexible use, and improved planning performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
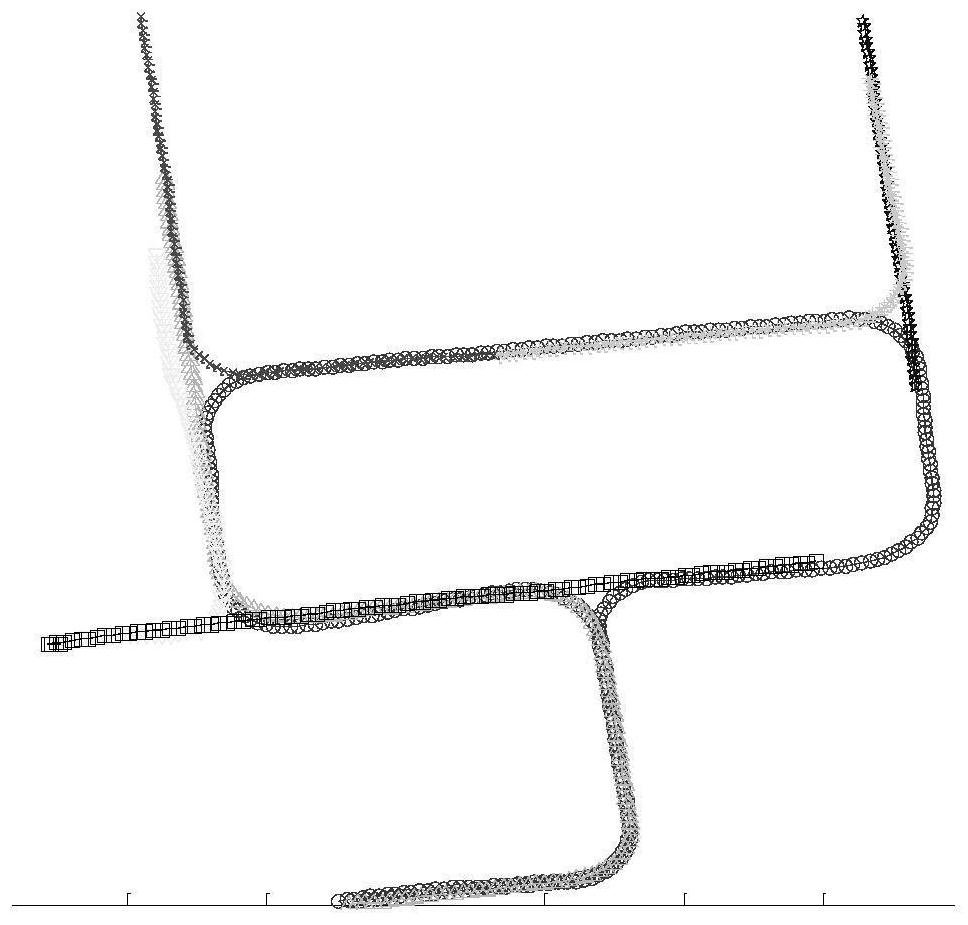
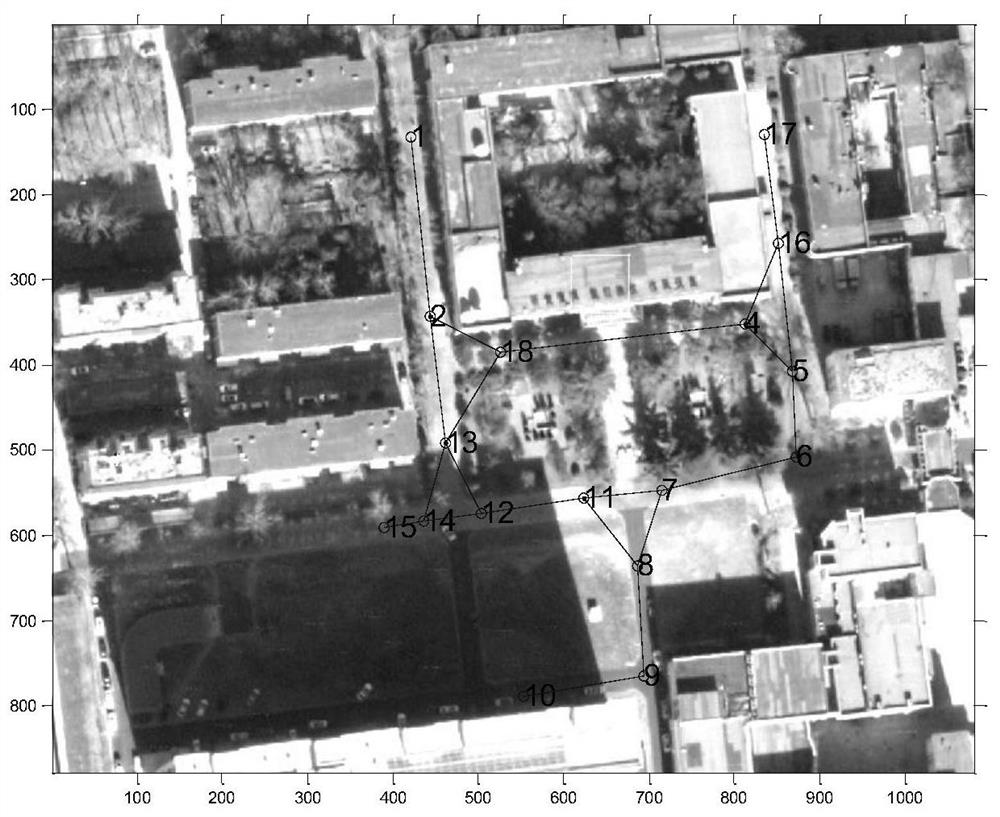
[0044]The present invention is aimed at specific unmanned driving technology application scenarios such as unmanned transportation logistics in large parks, unmanned express vehicles in residential areas, and large unmanned transportation trucks in ports. On the basis of overall consideration of the movement characteristics of the bottom platform and the road network structure information of the top layer , proposed a path planning method for unmanned vehicles based on a three-layer architecture: the first layer of the global road network layer retains the advantages of the road network structure of the combination of sparse points and lines, and adds turning information that conforms to the specific platform motion characteristics; The second layer of path trajectory layer is composed of sparse real platform motion trajectory segments...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More