

Novel binocular vision multi-target tracking method and system
A multi-target tracking and binocular vision technology, which is applied in the field of new binocular vision multi-target tracking methods and systems to achieve the effects of improving tracking accuracy and speed, and improving the level of automation and intelligence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
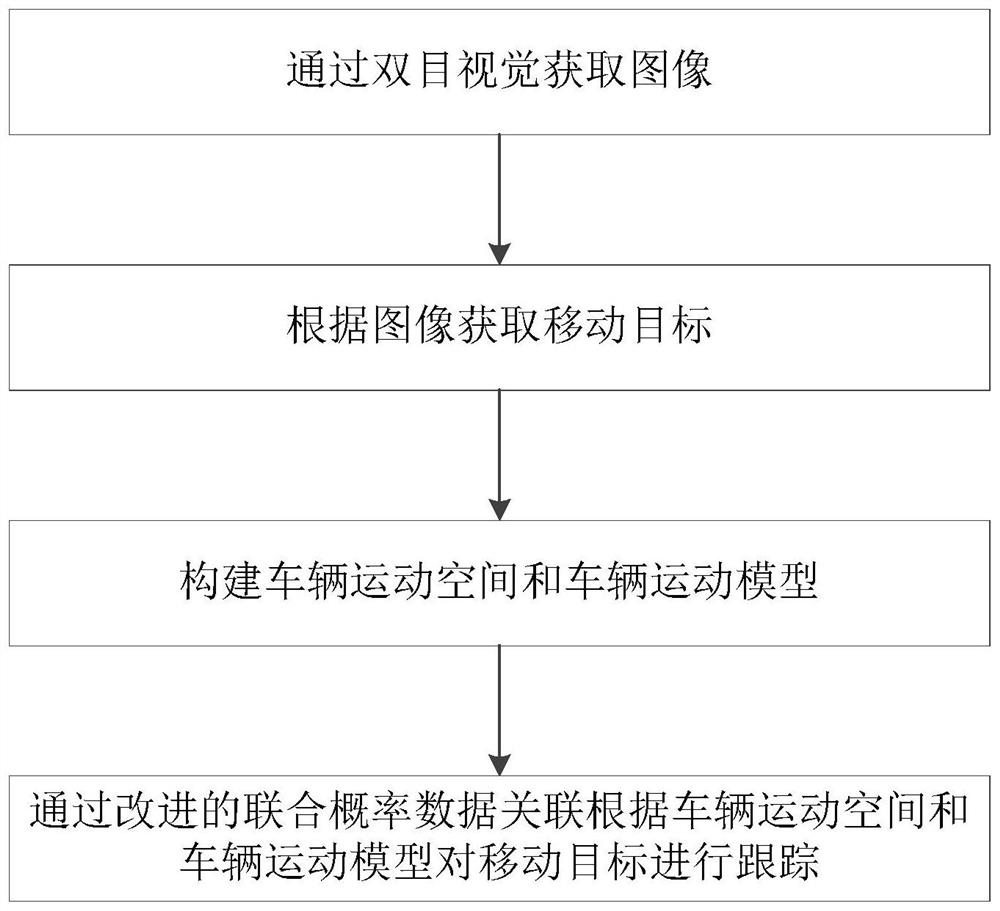
[0070] figure 1 It is a flow chart of the novel binocular vision multi-target tracking method involved in the present invention.
[0071] Such as figure 1 As shown, this embodiment 1 provides a new binocular vision multi-target tracking method, including: acquiring images through binocular vision; acquiring moving targets according to images; constructing vehicle motion space and vehicle motion models; and through improved joint probability The data association (joint probabilistic data association, JPDA) tracks the moving target according to the vehicle motion space and the vehicle motion model, realizes the multi-target tracking of the intelligent vehicle, greatly improves the automation and intelligence level of the driving system, and improves the tracking accuracy and speed , and there will be no obvious offset when tracking vehicles, and no missing tracking of pedestrians.
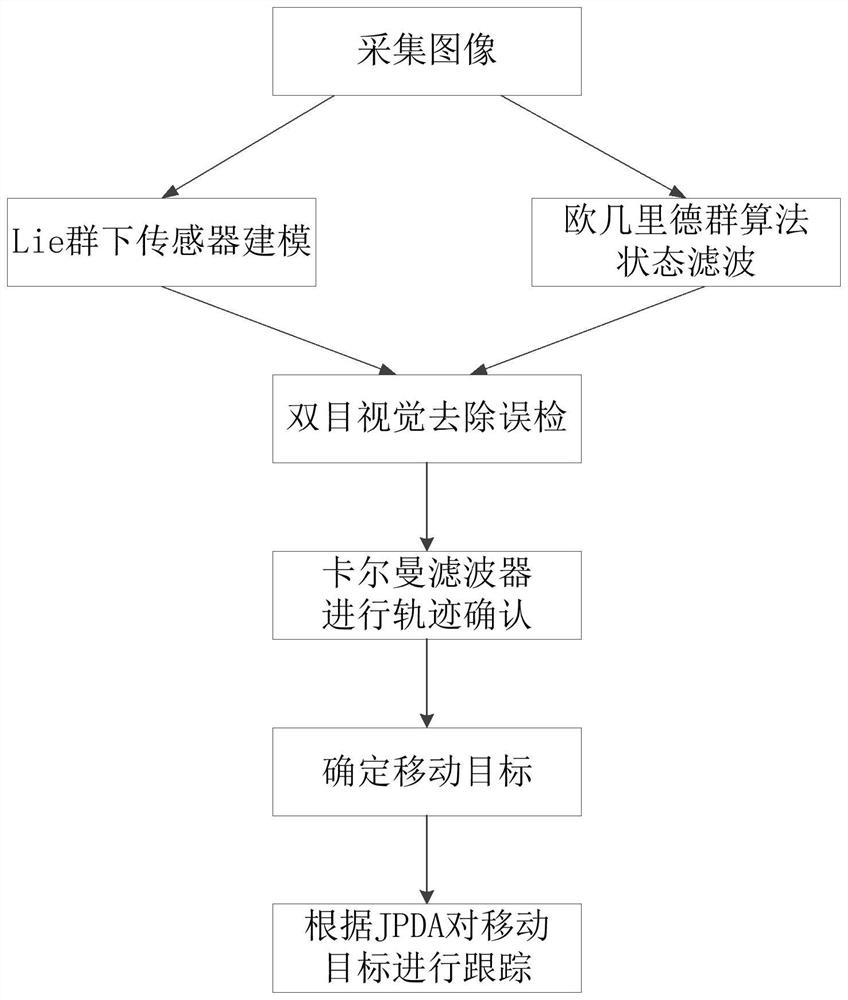
[0072] figure 2 It is a specific flow chart of the novel binocular vision multi-target tracki...
Embodiment 2
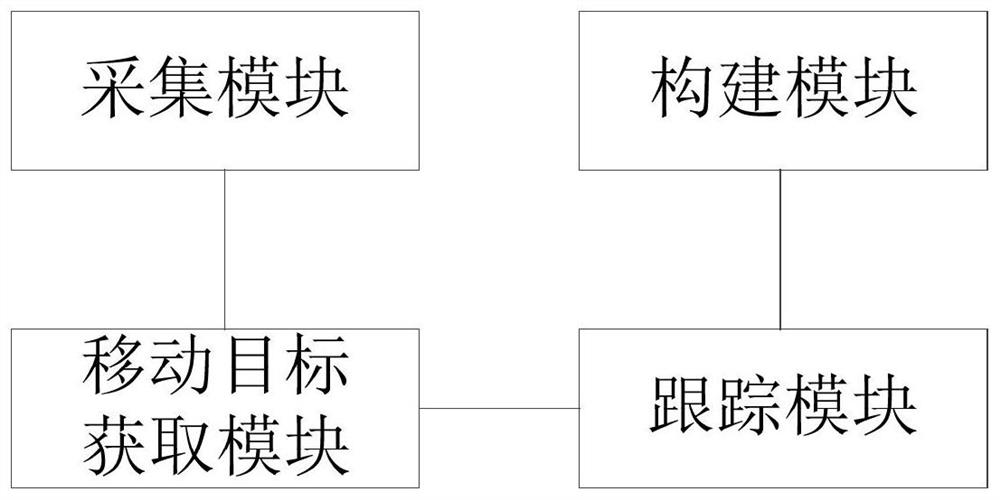
[0120] image 3 It is a functional block diagram of the novel binocular vision multi-target tracking system involved in the present invention.
[0121] Such as image 3 As shown, on the basis of Embodiment 1, this Embodiment 2 also provides a novel binocular vision multi-target tracking system, including: an acquisition module, which acquires images through binocular vision; a moving target acquisition module, which acquires moving targets according to the images ; a building block for constructing a vehicle motion space and a vehicle motion model; and a tracking module for tracking a moving target according to the vehicle motion space and the vehicle motion model through an improved joint probability data association.
[0122] In this embodiment, the acquisition module acquires images through binocular vision, the moving target acquisition module acquires moving targets according to the images, the construction module constructs the vehicle motion space and the vehicle motio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More