

Unmanned aerial vehicle and unmanned vehicle heterogeneous cluster formation tracking control method under topology switching
A tracking control and heterogeneous cluster technology, applied in the field of formation control, can solve problems such as difficult direct application of formation control methods, differences in state dimensions, and difficulty in maintaining stable communication between individuals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
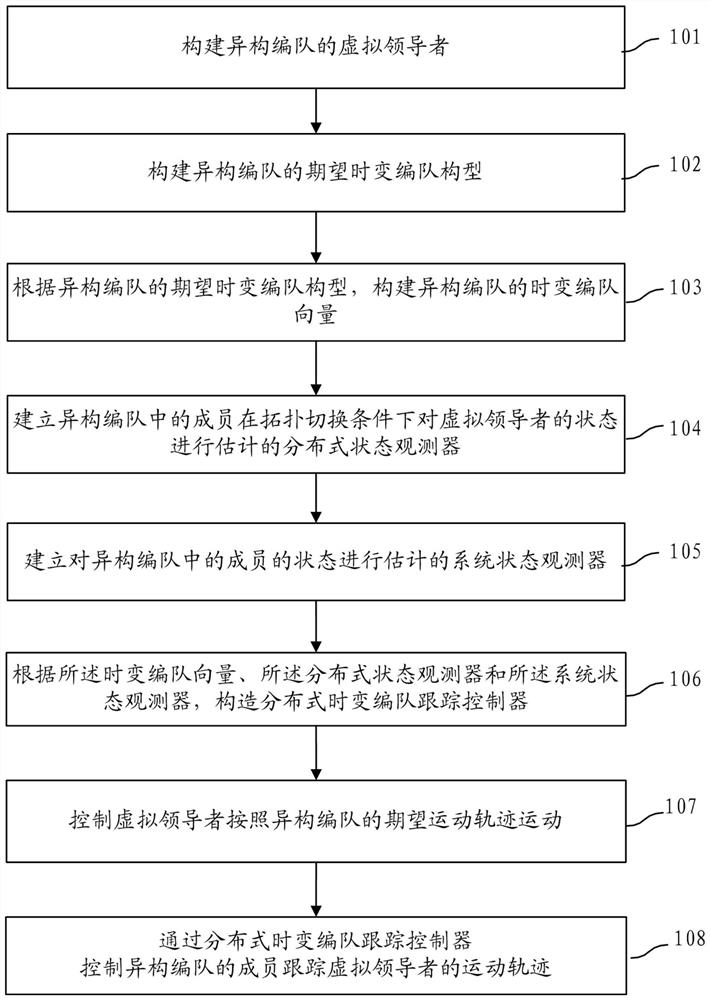
[0079] Example 1, such as figure 1 As shown, the present invention provides a method for tracking and controlling the heterogeneous cluster formation of unmanned aerial vehicles and unmanned vehicles under topology switching, and the tracking control method includes the following steps:
[0080] Step 101, constructing a virtual leader of a heterogeneous formation.
[0081] Step 102, constructing the expected time-varying formation configuration of the heterogeneous formation;
[0082] Step 103, constructing a time-varying formation vector of the heterogeneous formation according to the expected time-varying formation configuration of the heterogeneous formation;
[0083] In step 103, according to the expected time-varying formation configuration of the heterogeneous formation, construct the time-varying formation vector of the heterogeneous formation, specifically including:
[0084] According to the expected time-varying formation configuration of the heterogeneous formatio...
Embodiment 2
[0115] Embodiment 2, the present invention proposes a UAV-unmanned vehicle heterogeneous cluster system time-varying formation tracking control method under the condition of topology switching based on consistency theory, and its purpose is to design a distributed state observer based on The formation tracking controller makes the swarm system composed of multi-UAVs and unmanned vehicles form the desired time-varying formation configuration under the condition of topology switching, and at the same time track the desired reference track and realize the distribution of heterogeneous swarm systems Time-varying formation tracking motion. The specific plan is as follows:
[0116] (1) Establish the dynamics and kinematics models of UAVs and unmanned vehicles
[0117] The UAV chooses a quadrotor aircraft, and its dynamic model is as follows:
[0118]
[0119] Among them, x, y, z represent the position of the UAV in space, φ, θ, ψ represent the roll angle, pitch angle, yaw angle...
Embodiment 3
[0169] Embodiment 3, the present invention provides a specific example of time-varying formation tracking control of UAV-unmanned vehicle heterogeneous cluster system with switching topology conditions to verify the effectiveness of the method proposed by the present invention. The specific implementation steps of this example are as follows:
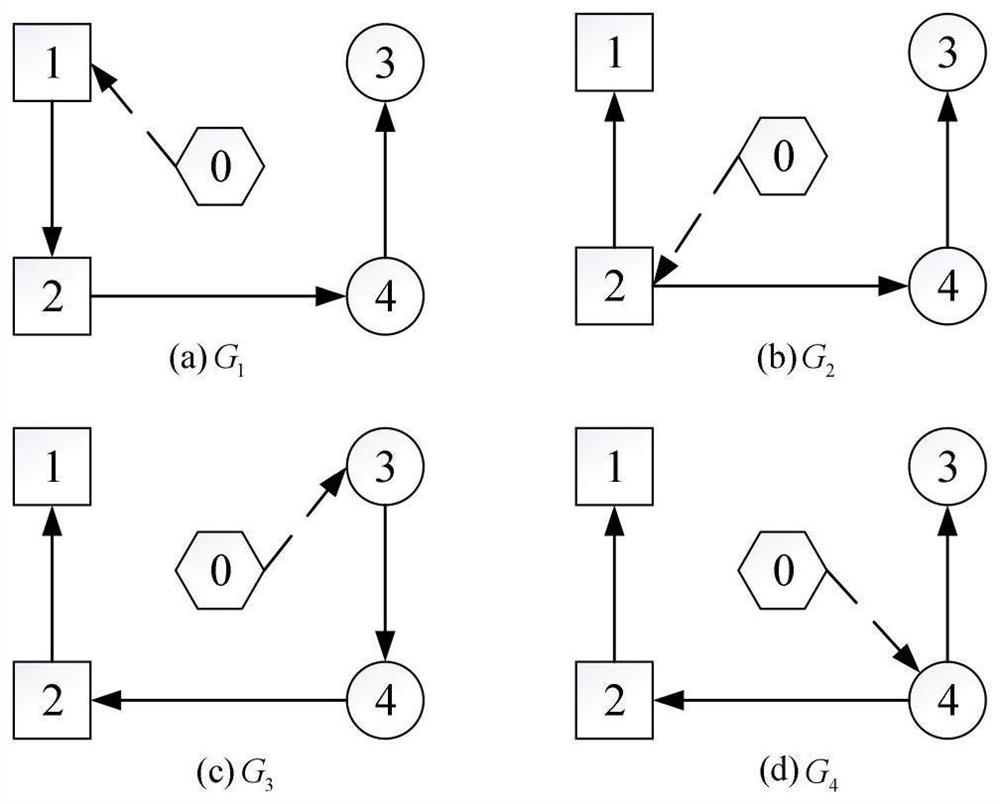
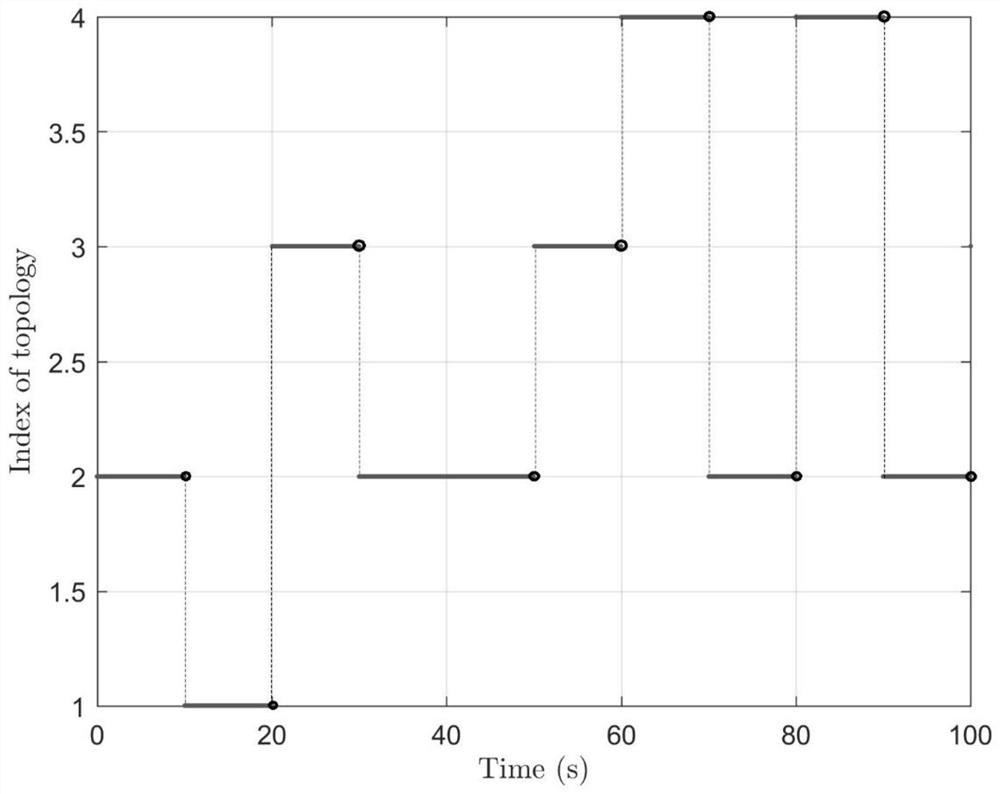
[0170] (1) UAV-UAV heterogeneous cluster system setup
[0171] Consider a heterogeneous swarm system composed of 2 drones (numbered 1,2) and 2 unmanned vehicles (numbered 3,4), and its topology is as follows figure 1 shown. UAVs and unmanned vehicles perform air-ground collaborative reconnaissance missions in the form of rotating circular formations. The two UAVs fly at a fixed altitude, so in this example, only the formation tracking control problem in the XY plane should be considered. Define the virtual leader as a second-order integrator model with parameters set to x 0 (0)=[0,0,0,0] T , then the virtual leader will move in a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More