

Unmanned aerial vehicle maneuvering target tracking method based on DDPG transfer learning
A technology of maneuvering target tracking and transfer learning, applied in the field of robot intelligent control, can solve problems such as the lack of consideration of the transfer ability of neural network time cost and difficult task training
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0099] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
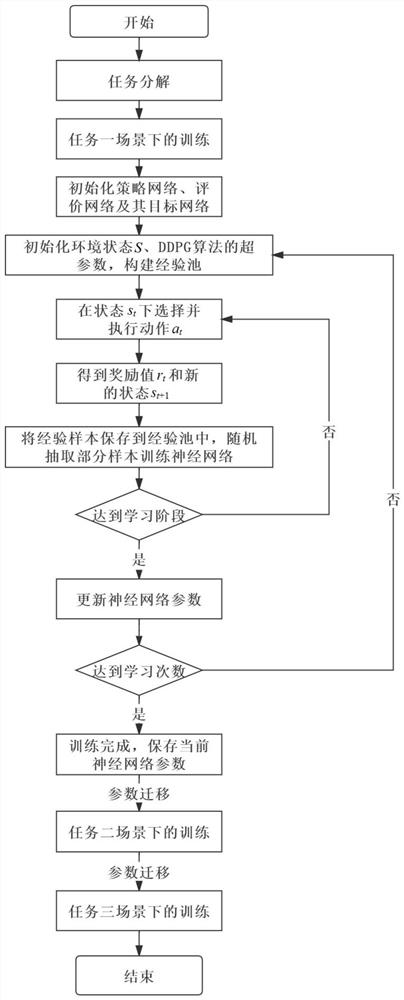
[0100]The UAV maneuvering target tracking method based on DDPG migration learning proposed by the present invention, the overall process is as follows figure 1 shown. Below in conjunction with accompanying drawing and specific embodiment, this technical solution is further clearly and completely described:
[0101] Step 1: Construct the Markov model (S, A, O, R, γ) for UAV maneuvering target tracking, where S is the input state of the UAV, A is the output action of the UAV, and O is The observation space of the UAV sensor, R is the reward function, and γ is the discount coefficient;
[0102] Step 1-1: Define the state space of the Markov model, that is, the input state S:
[0103] Combined with the UAV state, target state, and obstacle state information, set the model input state as:
[0104]
[0105] Where: UAV status S uav =[x uav ,y uav ,v uav ,θ u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More