

Method for establishing muscle nerve driver model in steering fault-tolerant control
A technology of driver model and fault-tolerant control, applied in the field of establishment of musculoskeletal driver model, to achieve accurate and realistic control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
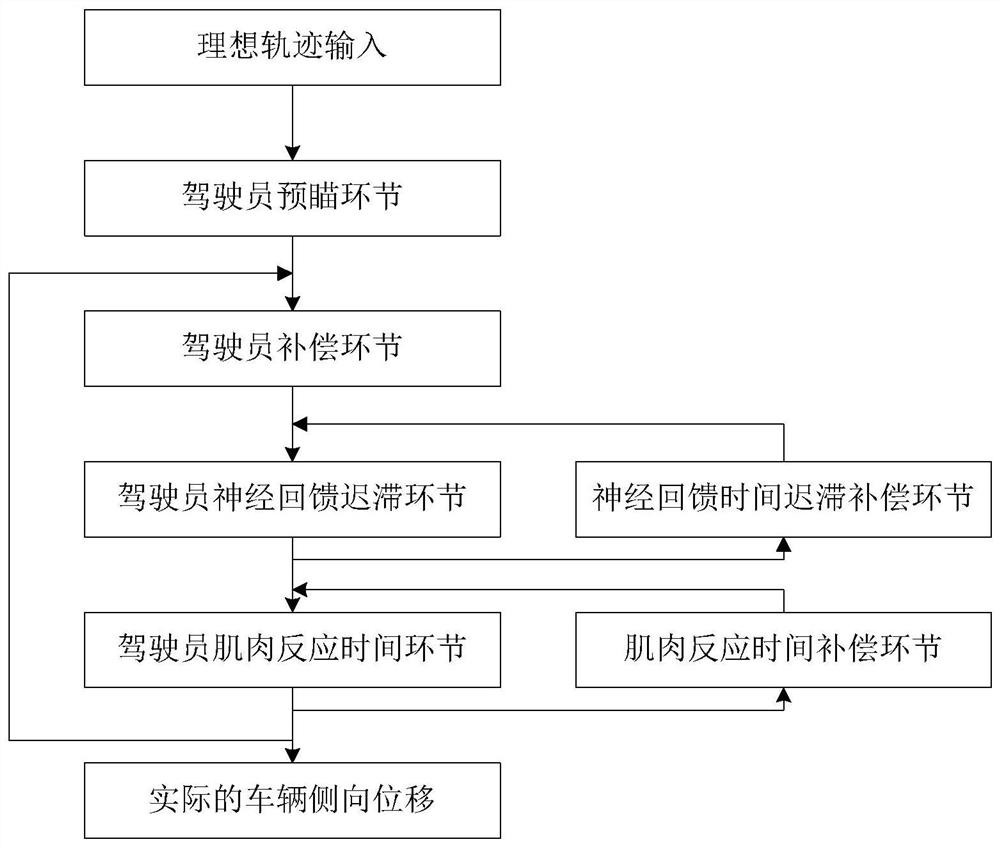
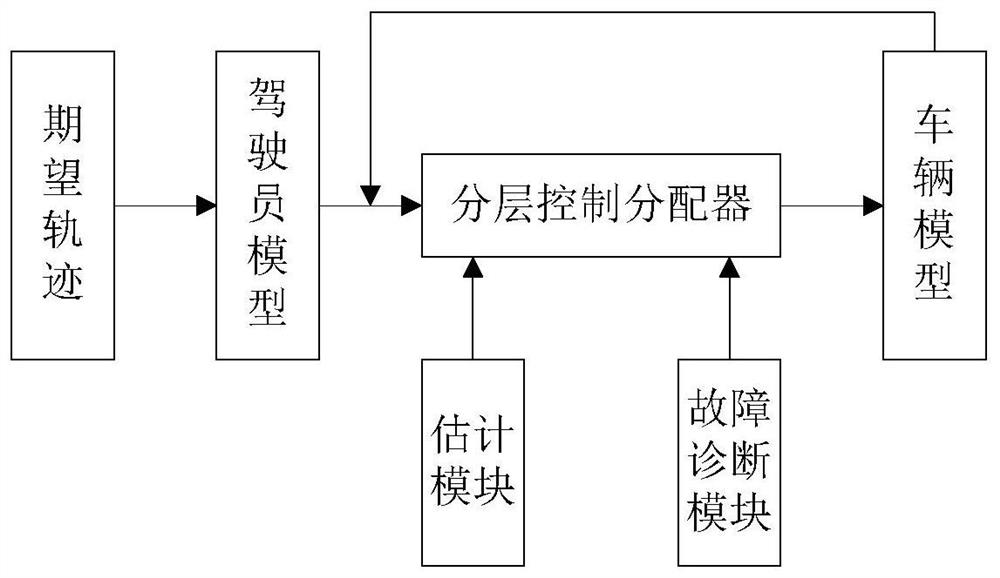
[0028] The present invention is based on the steering failure fault-tolerant control system. In the case of steering failure, since the steering signal does not work, it is necessary to introduce a driver model to convert the desired motion trajectory into the desired dynamic response of the vehicle, and then distribute it through hierarchical control. The controller redistributes the torque so as to achieve the purpose of vehicle fault-tolerant control.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More