

Multi-degree-of-freedom pneumatic software manipulator with accurate positioning function
An accurate positioning and degree of freedom technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large bending degree, small grasping force, and poor adaptability of actuators, so as to improve stiffness and bending degree, increase Effect of contact area and stability improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
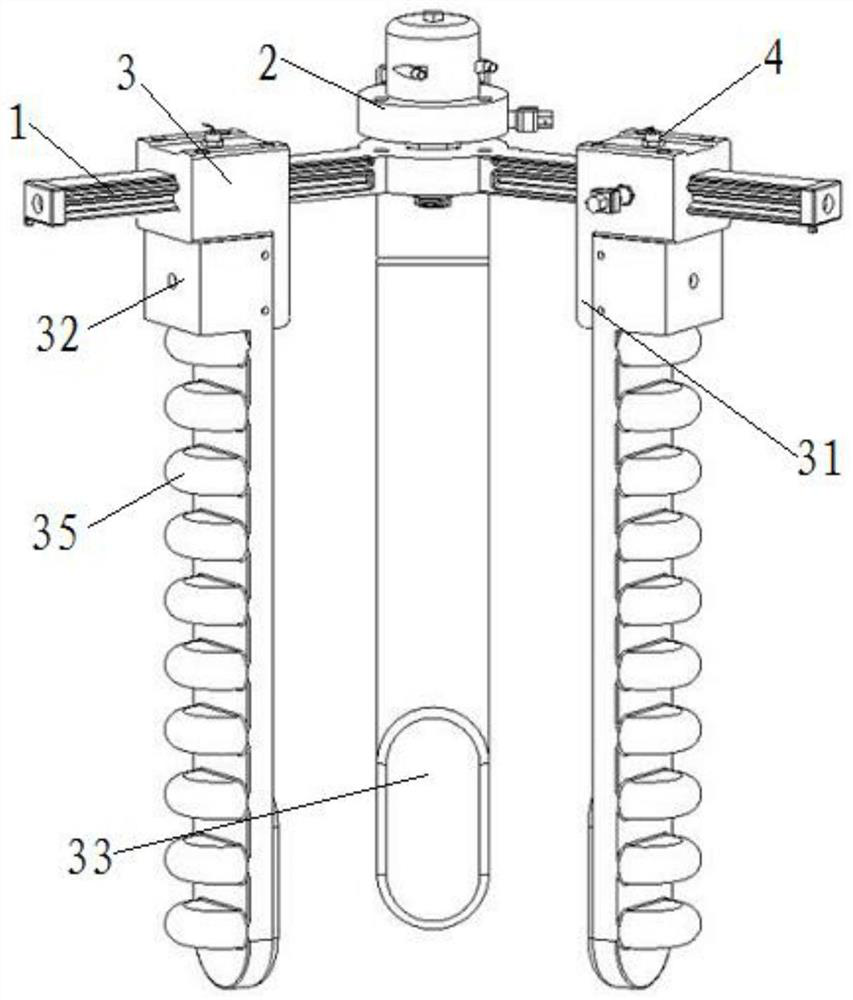
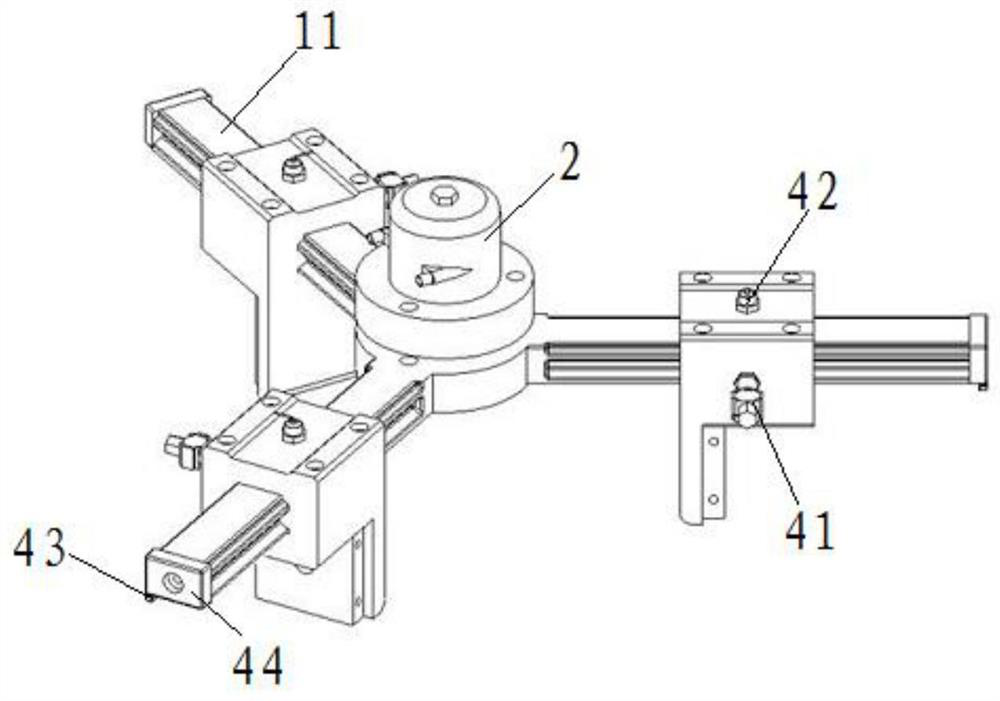
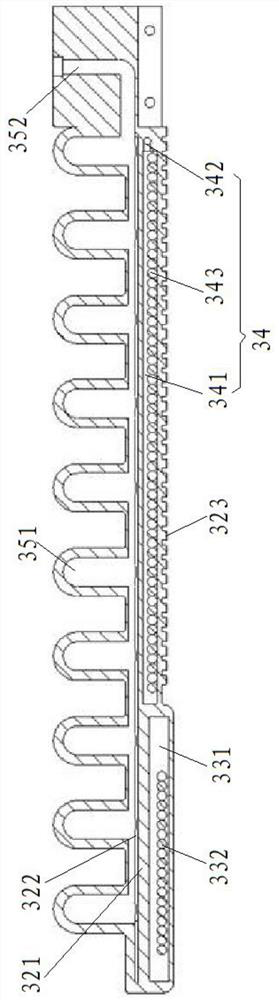
[0024] refer to Figure 1-3 As shown, the multi-degree-of-freedom pneumatic soft manipulator with accurate positioning function of the present invention includes:
[0025] The pneumatic guide rail 1 includes a plurality of pneumatic guide rail bodies 11 evenly distributed in the same circumference, and one end of the plurality of pneumatic guide rail bodies 11 is connected to the pneumatic device 2, and the pneumatic device 2 is used to drive the pneumatic guide rail 11 to rotate; preferably, the pneumatic device 2 is an air motor.
[0026] The pneumatic sliders 3 are sleeved on the pneumatic guide rail body 11 in one-to-one correspondence. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More