

A pure electric vehicle creep torque debounce control method
A pure electric vehicle and control method technology, which is applied in the field of pure electric vehicle creep torque debounce control, can solve the problems of high requirements for technical personnel debugging experience and complex calibration process, and achieves improved calibration efficiency, simple method and stable effect. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings. It should be noted here that the descriptions of these embodiments are used to help understand the present invention, but are not intended to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
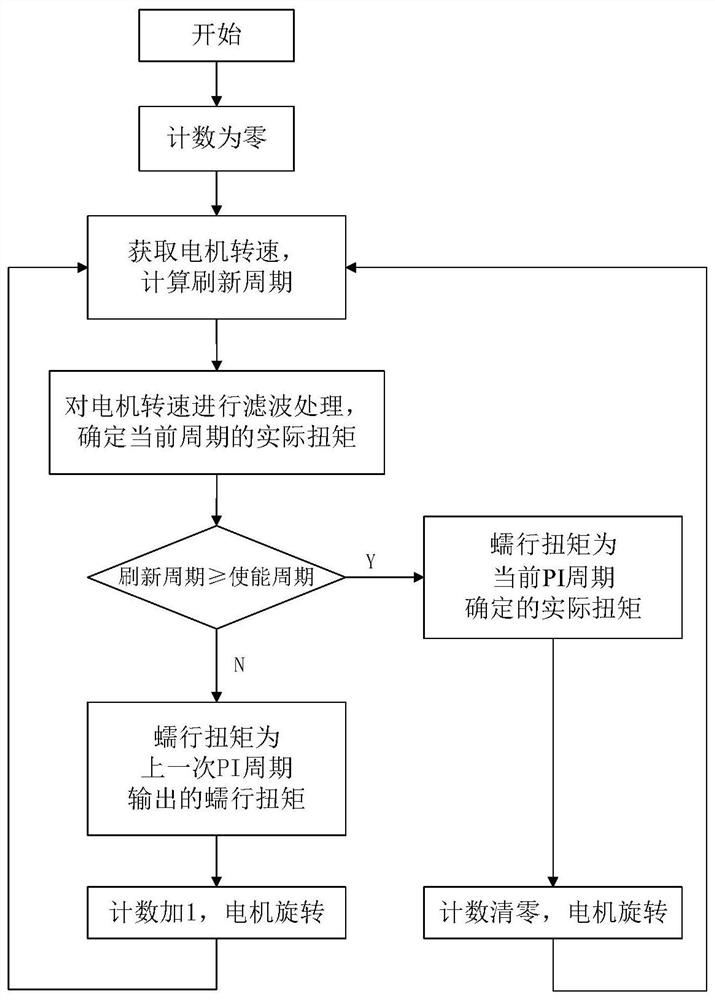
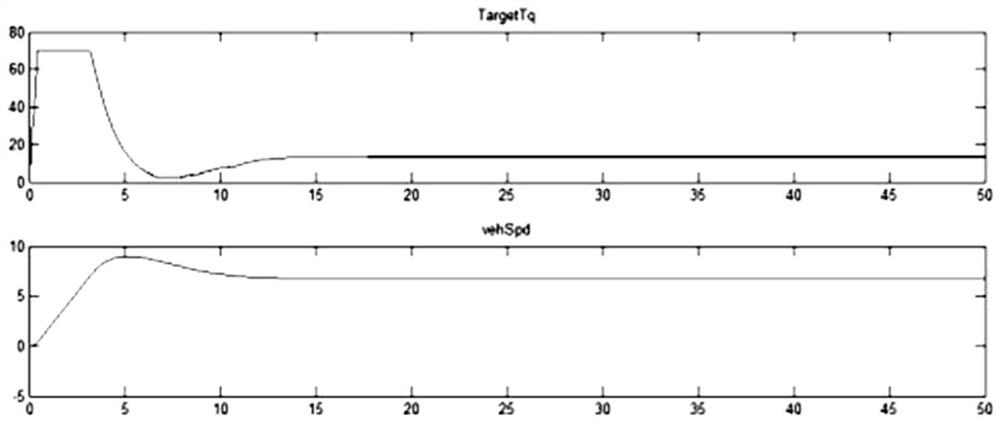
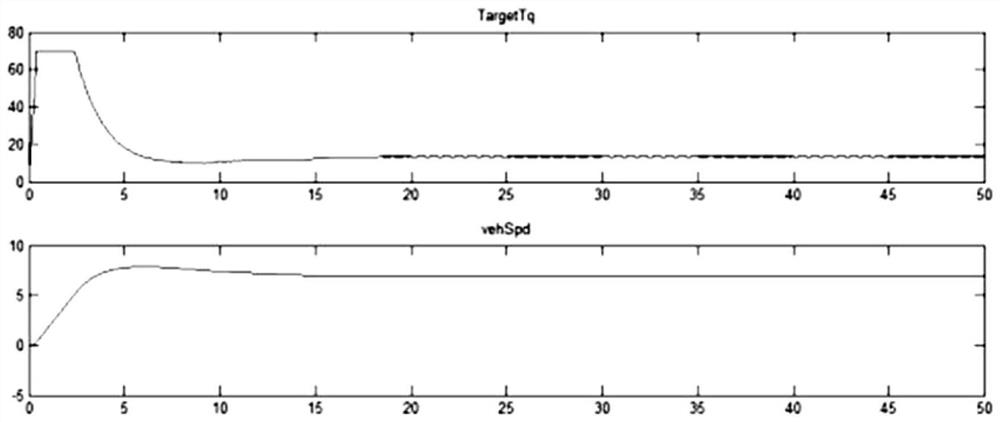
[0024] The PI controller uses the motor speed difference as input. Once the feedback speed fluctuates, it will cause the vibration of the control torque and affect the driving comfort. Therefore, it is necessary to consider the control of vibration elimination on the basis of the PI control strategy. In addition, for the calibration of creep control parameters, technicians rely on empirical data to continuously test the car on site, which consumes a lot of time to finall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More